بررسی و تحلیل عملکرد و ساختمان داخلی (رادارهای مونواستاتیک Monostatic)
نویسنده : افشین رشید
نکته : فرکانس هایی که در دسته وی-اچ-اف (VHF ) قرار می گیرند از قابلیت بالایی در کشف اهداف پنهان کار برخوردارند .
رادارهای مونواستاتیک Monostatic
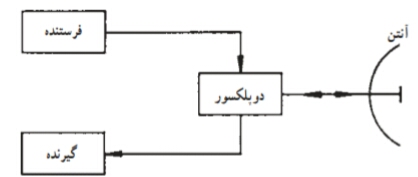
رادارهایی که فرستنده و گیرندهی آنها در یک نقطه واقع است را مونواستاتیک مینامیم. در واقع فاصلهی بین گیرنده و فرستنده در ای رادارها بسیار کوچکتر از فاصله نقطهی استقرار رادار نسبت به هدف است لذا فرستنده و گیرنده یک فضای یکسان را پوشش میدهند. در اغلب موارد فرستنده و گیرندهی رادار مونواستاتیک در یک سامانه تعبیه شده و از یک آنتن استفاده میکنند. جداسازی دو مود کاری گیرندگی و فرستندگی در این رادارهایی که از یک آنتن گیرنده فرستنده استفاده می کنند توسط واحدی به نام سلول گیرنده/فرستنده یا T/R cellیا داپلکسر Duplexer صورت میگیرد. این سلول وظیفه دارد در حالت فرستندگی ورودی گیرنده را بلوکه کند. در این رادارها به کمک اندازهگیری زمان رفت و برگشت سیگنال و ضرب آن در سرعت حرکت موج (سرعت نور) فاصله هدف استخراج میشود. همچنین سرعت هدف را میتوان به کمک خاصیت شیفت داپلر فرکانس اکو هدف محرک تشخیص داد.
کاربرد و کارکرد رادارهای مونواستاتیک
رادار جستجو و نظارت هوایی مونواستاتیک با برد نسبتاً بالا و دو بعدی و همچنین با برد در حدود 300 کیلومتر و سه بعدی و نمونه ای با قابلیت مقابله با جنگ الکترونیک تا 360 کیلومتر و انواعی از رادارهای پسیو است. فرکانس هایی که در دسته وی-اچ-اف قرار می گیرند از قابلیت بالایی در کشف اهداف پنهان کار برخوردارند .
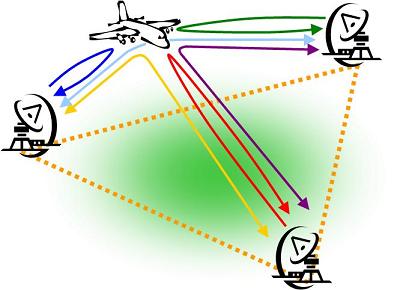
گفتنی است رادارهایی که در آن فرستنده و گیرنده یکی هستند مونواستاتیک، آنهایی که فرستنده و گیرنده در دو نقطه متفاوت و فاصله دار هستند بایاستاتیک و مجموعه هایی با چند گیرنده و چند فرستنده جدا از هم مولتی استاتیک گفته می شود.گفتنی است یکی از روش های پنهان کاری رادار استفاده از سطوح زاویه دار یا منحنی در بدنه هواگرد به طوری است که بازتابش امواج به محل فرستنده برنگردد. با استفاده از رادارهایی با فرستنده و گیرنده فاصله دار که در محل های متفاوتی نصب شده اند، بازتاب های حاصله از هواگرد رادار گریز توسط گیرنده ای دیگر دریافت شده و در نتیجه هدف کشف می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی از بین بردن در همریختگی ناشی از اهداف ثابت در رادارها و سونارهای دریایی active sonar ؛ passive sonar (علوم مخابرات)
نویسنده: افشین رشید
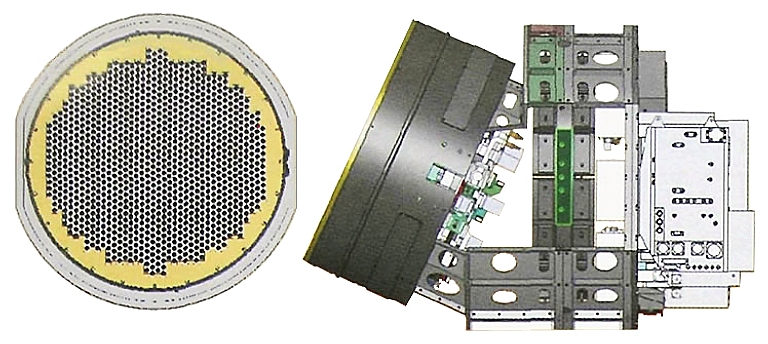
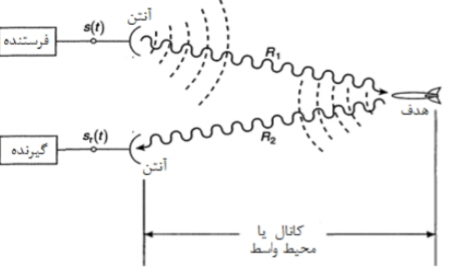
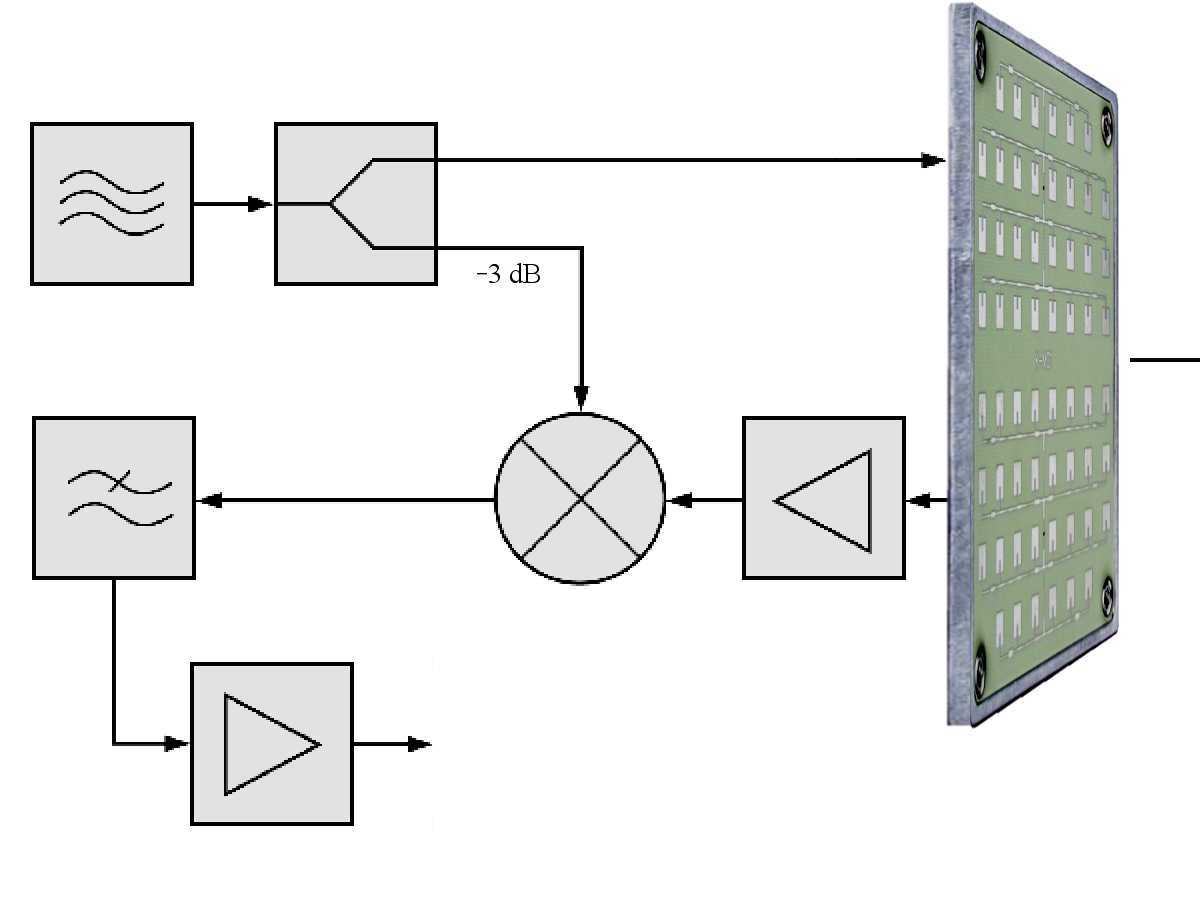
(تفاوت رادار با سونار sonar) بلوک دیاگرام یک رادار نسبتاً پیشرفته نشانگر از استفاده بخش ها و ماژول های مخابراتی مختلف در آن از (داپلکسر تا میکسر ) و نهایتاً Antena
تکنولوژی سونار چیست؟
سونار (sonar) ، ناوبری و تشخیص فاصله توسط صوت ( sound navigation and ranging)، تکنولوژی است که با استفاده از انتشار صدا در زیر آب قادر به شناسایی دیگر ناوها یا کشتی ها است
امروزه فیلترهای شانه ای در کاربرد های گسترده ای نظیر حذف نمودن هارمونیک های خطوط تغذیه و از بین بردن در همریختگی ناشی ازاهداف ثابت در رادارها و سونارهای نشان دهنده هدف متحرک استفاده می شوند.
تصویربرداری از اهداف زیر آب با استفاده از امواج صوتی، (sonar )
تصویربرداری از اهداف زیر آب با استفاده از امواج صوتی، مشابه روش به کار رفته در رادار روزنه مصنوعی، امکان پذیر است و در سال های اخیر در پژوهش های متعددی به موضوع سونار روزنه مصنوعی پرداخته شده است. در مواردی که نیاز به تصویربرداری از اهداف زیر آبی متحرک باشد، ایده سونار روزنه مصنوعی معکوس با الهام گرفتن از رادار روزنه مصنوعی معکوس قابل به کارگیری است اما باید شرایط و محدودیت های کانال زیر آب، مدنظر قرارگیرد. در سونار روزنه مصنوعی معکوس تک پایه و چالش های به کارگیری آن، سونار روزنه مصنوعی معکوس چندپایه ای پیشنهاد خواهد شد که با شرایط و هندسه خاص قرارگیری و با استفاده از منابع مجازی ایجاد شده به دلیل نحوه انتشار امواج در آب های کم عمق، تصاویر باکیفیت تری از اهداف متحرک زیر آب نسبت به حالت تک پایه ایجاد خواهد کرد. کیفیت بهتر تصاویر به دلیل دستیابی به چندگانگی مکانی ناشی از چندپایه کردن مجازی سونارهاست که با استفاده از خاصیت آب های کم عمق و چندمسیرگی موجود در آن و با استفاده از تنها یک فرستنده واقعی ایجاد گشته است.
تفاوت سونار با رادار:
رادارها امواج الکترومغناطیسی به کار می برند، و سونارها از امواج فراصوتی، که مانند امواج صوتی، ولی دارای بسامد بسیار بالا هستند استفاده می کنند. امواج فراصوتی هم مانند امواج صوتی و نور بازتابش می شوند. به کمک این امواج بازتابش شده ی نقشه ی سطح زیر دریاها و جای پستی و بلندی ها کاملاً مشخص می شود.
شرط عملکرد سیستم سونار :
نسبت سیگنال به پارازیت مشخص میکند که آیا سونار می تواند سیگنال هایی را در حضور پارازیت های زمینه در اقیانوس مشخص کند یا خیر.
برای این کار مواردی از جمله مرتبه منبع ، انتشار صدا ، جذب صدا ، اتلاف در انعکاس ، صداهای محدود و ویژگی های دریافت کننده در نظر گرفته می شود.
انواع سونار:
سونار دو نوع است :
۱) (سونار فعال)Active Sonar
۲) (سونار غیر فعال)Passive Sonar
سونار فعال ( محدوده پژواک ):
سیستم سونار فعال ، مثل ماهی یابها ، صداهای پژواک و سونارهای نظامی یک پالس صدا را می فرستند و منتظر پژواک آن می مانند . در سیستم سونار فعال منبع مانند یک دریافت کننده عمل میکند.
عملکرد سونار active فعال:
معادله باید موارد زیر را در نظر بگیرد:
بلندی شدت منبع صدا (مرتبه منبع)
انتشار صدا و میرایی هنگامی که پالس صدا از سونار به سوی هدف حرکت میکند(اتلاف حرکتی)
مقدار صدای منعکس و برگردانده شده به سمت سونار توسط هدف (توانایی هدف)
انتشار صدا و میرایی هنگامی که پالس منعکس شده به سوی دریافت کننده برمیگردد(اتلاف حرکتی)
پارازیتهای زمینه در دریافت کننده(مرتبه پارازیتها)
عبارتها در معادلات سونار بر حسب دسیبل هستند و با یکدیگر جمع میشوند تا معادلات سونار را بوجود آورند.
عملکرد سونار passive غیر فعال :
سونار غیر فعال با ایجاد پالس های صوتی (معروف به پینگ) ، وسپس گوش دادن به پالس بازگشتی عمل میکند . برای تشخیص فاصله از هدف ، شخص می تواند مدت زمان بین دریافت و ارسال پالس را اندازه گیری کند. برای اندازه گیری جهت و راستای هدف می توان از هیدروفونیک های متعدد استفاده کرده ، و سپس زمان دریافت پالس توسط هر یک از این هیدروفون ها را اندازه گرفت ، و با مقایسه این زمان ها به راحتی می توان جهت و راستای هدف را تعیین نمود .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی و تحلیل رادار پالس فشرده(Pulse Compression)
نویسنده : افشین رشید
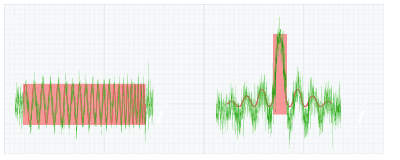
این رادار از پالس های با عرض زیاد استفاده می نماید و برای افزایش دقت از مدولاسیون فاز یا فرکانس در هر پالس استفاده می کند. در نتیجه ضمن افزایش پهنای باند تشخیص دقیق فاصله اهداف نیز حاصل می شود و نسبت به رادار نوع قبلی دارای این مزیت است که توان پیک (حداکثر توان) فرستنده را در حد معتدلی نگاه می دارد .رادار ها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند.مکانیسم عمل همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند.
معمولاً، سیستمهای (رادار پالس فشرده) فرآیند مشابهی را در حوزه دیجیتال به نام فیلتر همسان به کار میگیرند ، جایی که سیگنال دریافتی با نسخه معکوسشده زمان پالس ارسالی در هم میآید. فیلتر تطبیقی اغلب در حوزه فرکانس انجام می شود زیرا پیچیدگی در حوزه زمان معادل ضرب در حوزه فرکانس است و فرآیند را سریعتر می کند. از آنجایی که پالس اولیه با زمان معکوس است، خروجی فیلتر شده با عرض پالس که همان 1 ثانیه است به تاخیر می افتد.به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که آیا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند ؛ حتی سرعت جسم نیز بخوبی قابل محاسبه است.کاربرد ها نظارت و رهگیری هواپیماها و موشکها نظارت و رهگیری اهداف دریایی یا زمینی نظارت و رهگیری اجرام فضایی هواشناسی اندازه گیری سرعت وسایل نقلیه رادار؛ برای تصویر دو-بعدی و سه-بعدی پیداکردن مین در زمین فرود(برای نمونه برای هواپیما) دقیق عکسبرادری از کرههای دیگر با رادار تصویری پرهیز تصادم پیدا کردن آب در مناطق شنزار و خشک نظارت بر اهداف جنبنده در زمین نظارت بر اهداف جنبنده در مناطق پردرخت و جنگل های انبوه از موارد کاربرد (رادار پالس فشرده) میباشد.
فشرده سازی پالس با مدولاسیون فرکانس غیر خطی مزایای واضحی دارد. برای مثال، دیگر نیازی به وزن دهی دامنه ای برای سرکوب لوب های جانبی به دست آمده، به اصطلاح لوب های کناری زمانی ندارد، زیرا شکل مدولاسیون از قبل عملکرد وزن دهی دامنه لازم را انجام می دهد.تنظیم فیلتر با لبه های بسیار تندتر و با این وجود لوب های جانبی کم در حال حاضر امکان پذیر است. به این ترتیب، از تلفات نسبت سیگنال به نویز که در غیر این صورت به دلیل وزن دهی دامنه رخ می دهد، جلوگیری می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی و کاربرد رادارهای پالسی با قدرت تفکیک بالا (High Resolution)
نویسنده : افشین رشید
در این رادارها عرض پالسی بسیار کوچک انتخاب می شود و چون میزان دقت در تشخیص فاصله توسط عرض پالسی مشخص می گردد دارای دقت بالایی در تشخیص فاصله هدف می باشد. (هر قدر عرض پالس کوچکتر باشد محاسبه فاصله دقیقتر است.) این رادارها برای آشکار سازی اهداف ساکن در حضور کلاتر (سیگنالهای برگشتی ناخواسته به صفحه رادار) و نیز تشخیص یک هدف در میان چند هدف نزدیک به هم قابل استفاده می باشد.در مواردی یک سیستم رادار دارای بیش از یک فرستنده و گیرنده می باشد که به صورت پالسی خوانده می شود. یک شبکه عمل می کنند. این سیستم P8F ها مولتی استاتیک پالسی، راداری است که به طور همچنین رادارها را می توان براساس سیگنال ارسالی آنها دسته بندی کرد. نوع CWP9F پیوسته و معمولا با دامنه ثابت ارسال می کند. این سیگنال ارسالی می تواند با مدولاسیون FM و یا با فرکانسی ثابت فرستاده شود. هنگامی که شکل موج ارسالی به صورت پالسی است ( بامدولاسین FM و یا بدون آن) ، رادار پالسی P و غیر فعالP1F نامیده میشود. همچنین بر اساس وجود فرستنده یا نبود آن، رادارها بترتیب به دو دسته فعال P10FP تقسیم می شوند.
بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.
اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. پالسی نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
ساختمان داخلی ( رادار هواشناسی یا Meteorological radar ) دو قطبی شدن نبض رادار (گیرنده _ فرستنده)
نویسنده: افشین رشید
نکته : سیستم های راداری داپلر با طراحی خود می توانند اطلاعاتی راجع به حرکت اهداف و همچنین موقعیت آنها ارائه دهند. وقتی پالس امواج رادیویی را منتقل می کند ، سیستم فاز (شکل ، موقعیت و فرم) آن پالس ها را ردیابی می کند . رادار های هواشناسی توانایی شناسایی حرکت قطره های باران و شدت بارش را دارند. هر دو نوع این اطلاعات می تواند برای تعیین ساختار طوفان و پتانسیل آن برای ایجاد هوای بد تحلیل شود.

با اندازه گیری شیفت (یا تغییر) فاز بین یک پالس منتقل شده و یک پژواک دریافتی ، حرکت هدف مستقیماً به سمت یا دور شدن از رادار محاسبه می شود. سپس این یک سرعت را در امتداد جهتی که رادار نشان می دهد ، فراهم می کند که سرعت شعاعی نامیده می شود. تغییر فاز مثبت به معنای حرکت به سمت رادار و تغییر منفی نشان دهنده حرکت به دور از رادار است.علاوه بر این ، رادار هواشناسی یا Meteorological radar از دو قطبی شدن نبض رادار (گیرنده _ فرستنده) استفاده میکند.رادار هواشناسی یا Meteorological radar به پیش بینی کنندگان شرایط آب و هوایی کمک می کند تا باران ، تگرگ ، برف ، خط باران / برف و گلوله های یخی را برای پیش بینی انواع آب و هوا شناسایی کنند.یکی دیگر از مزایای مهم رادار هواشناسی یا Meteorological radar با وضوح بیشتری بقایای گردباد موجود در هوا (توپ آوار) را تشخیص می دهد - به پیش بینی کنندگان اجازه می دهد تا تأیید کنند که گردباد روی زمین است و باعث آسیب می شود تا بتوانند با اطمینان بیشتری به جوامع موجود در این مسیر هشدار دهند. این امر مخصوصاً در شب هنگامی که لکه های زمینی قادر به دیدن گردباد نیستند بسیار مفید است.

اصول رادارها این است که پرتویی از انرژی به نام امواج رادیویی از آنتن ساطع می شود. هنگامی که آنها به اشیا objects موجود در جو برخورد می کنند ، انرژی در همه جهات پراکنده می شود و مقداری از انرژی مستقیماً به سمت رادار منعکس می شود.هرچه جسم بزرگتر باشد ، میزان انرژی برگشتی به رادار نیز بیشتر خواهد بود. این توانایی را برای ما فراهم می کند تا قطرات باران را در جو مشاهده کنیم. علاوه بر این ، مدت زمانی که پرتوی انرژی برای انتقال و بازگشت به رادار نیز نیاز دارد ، با فاصله تا آن جسم است.اثر تغییر فاز مشابه "تغییر داپلر" است که با امواج صوتی مشاهده می شود. با "تغییر داپلر" ، به دلیل فشرده سازی (تغییر فاز) امواج صوتی ، صدای صوتی جسمی که به سمت مکان شما حرکت می کند بیشتر است . هنگامی که یک شی از مکان شما دور می شود ، امواج صوتی کشیده می شوند و در نتیجه فرکانس کمتری ایجاد می کنند.احتمالاً این اثر را از وسیله نقلیه یا قطار اضطراری شنیده اید. هنگامی که وسیله نقلیه یا قطار از مکان شما عبور می کند ، آژیر یا سوت هنگام عبور جسم پایین می آید.پالس های رادار داپلر به طور متوسط حدود 450000 وات قدرت انتقال دارند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی تخصصی و کامل از (رادارهای اهداف وسیع P17)
نویسنده : افشین رشید

نکته:در ساختار رادارهای رادارهای (اهداف وسیع P17) گستردگی این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد.
مهمترین اعمالی که یک رادارهای (اهداف وسیع P17) می تواند انجام دهد عبارتند از : 1 -واضح سازی اهداف ، 2 -آشکارسازی ، 3 -اندازه گیری ، 4 -دسته بندی
واضح سازی اهداف مربوط به توانایی رادارهای (اهداف وسیع P17) در جداسازی سیگنال هدف مطلوب از دیگر اهداف و جداسازی سیگنال مطلوب از سیگنالهای نامطلوب (نویز و موانع) می باشد . در حالت ایده آل می خواهیم که سیگنال اهداف مختلف مستقل از نزدیکی آنها به یکدیگر، از هم متمایز باشند . یکی از عوامل موثر در قابلیت تمایز بین اهداف، سیگنال ارسالی است. پهنای باند بزرگتر برای سیگنال ارسالی وضوح بهتری در پارامتر فاصله را در پی دارد. در حالیکه طول پالس طولانی تر منجر به وضوح بیشتری در فرکانس می گردد. همچنین خصوصیات آنتن نیز در آن موثر است. آنتن ها یی با پهنای باند فضایی کوچک وضوح بهتری را در موقعیت هدف نتیجه می دهد. عمل آشکارسازی شامل تشخیص حضور سیگنال بازگشتی از هدف مطلوب است. این مسئله به ظاهر ساده بنظر می رسد، اما در عمل به علت وجود سیگنال های ناخواسته و نویز گیرنده، عملی پیچیده است. می توان با طراحی مناسب گیرنده و ارسال سیگنالی با انرژی بیشتر در هر پالس اثر نویز را کاهش داد. همچنین رادارهای (اهداف وسیع P17) با طراحی سیگنال ارسالی و روشهای پردازش سیگنال می توان میزان حضور سیگنال موانع را کم کرد. برای مشخص شدن محل جسم به تعریف دستگاه مختصات نیاز داریم.
_11dc.jpg)
رادارهای (اهداف وسیع P17) قادرند موقعیت هدف در فضای سه بعدی، بردار سرعت هدف (شامل سرعت آن در سه مولفه فضا)، جهت زاویه ای و بردار سرعت زاویه ای (نرخ تغییر زاویه در هر دو مولفه زاویه ای) را نیز بدست آورند. تمام این اندازه گیری ها می تواند بطور همزمان برای چند هدف در شرایطی که نویز و موانع نیز حضور دارند، محاسبه شود. اندازه سرعت شعاعی هدف با تغییر فاصله در یک بازه زمانی و یا از طرق شیفت فرکانس داپلر قابل اندازه گیری است. سرعت مطلق و جهت حرکت یک هدف متحرک با ردیابی آن می تواند بدست آید که از اندازه گیری های رادار از محل هدف در یک بازه زمانی محاسبه می شود. به همین روش می توان سرعت زوایه ای را نیز اندازه گیری کرد.
![]()
در رادارهای (اهداف وسیع P17) بدست آوردن جهت زاویه هدف در یک بعد زاویه ای توسط دو بیم آنتن انجام می شود. این دو بیم به میزان کمی در زاویه جابجا می شوند و با مقایسه اندازه بازگشتی دریافت شده در هر بیم، اندازه زاویه بدست می آید. برای اندازه گیری در هر دو بعد زاویه ای به چهار بیم آنتن نیاز داریم و دقت این اندازه گیری به اندازه آنتن وابسته می باشد . صفحه نمایش رادار برای نشان دادن نتایج بدست آمده به صورت بصری برای کاربر می باشد و دارای انواع مختلفی است. سه نوع از نمایشگرهایی که امروزه در رادارهای کلاسیک بیشتر مورد استفاده قرار می گیرد در اسکوپ تصویر بالا ، جهت عمودی، تابعی از قدرت سیگنال پوش موج بازگشتی از هدف است. این تابعیت می تواند به صورت خطی یا لگاریتمی باشد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(بررسی و تحلیل) مهمترین اعمالی که یک رادار می تواند انجام دهد
نویسنده: افشین رشید
.
نکته: مهمترین اعمالی که یک رادار می تواند انجام دهد عبارتند از : 1 -واضح سازی اهداف ، 2 -آشکارسازی ، 3 -اندازه گیری ، 4 -دسته بندی
واضح سازی اهداف مربوط به توانایی رادار در جداسازی سیگنال هدف مطلوب از دیگر اهداف و جداسازی سیگنال مطلوب از سیگنالهای نامطلوب (نویز و موانع) می باشد . در حالت ایده آل می خواهیم که سیگنال اهداف مختلف مستقل از نزدیکی آنها به یکدیگر، از هم متمایز باشند . یکی از عوامل موثر در قابلیت تمایز بین اهداف، سیگنال ارسالی است. پهنای باند بزرگتر برای سیگنال ارسالی وضوح بهتری در پارامتر فاصله را در پی دارد. در حالیکه طول پالس طولانی تر منجر به وضوح بیشتری در فرکانس می گردد. همچنین خصوصیات آنتن نیز در آن موثر است. آنتن ها یی با پهنای باند فضایی کوچک وضوح بهتری را در موقعیت هدف نتیجه می دهد. عمل آشکارسازی شامل تشخیص حضور سیگنال بازگشتی از هدف مطلوب است. این مسئله به ظاهر ساده بنظر می رسد، اما در عمل به علت وجود سیگنال های ناخواسته و نویز گیرنده، عملی پیچیده است. می توان با طراحی مناسب گیرنده و ارسال سیگنالی با انرژی بیشتر در هر پالس اثر نویز را کاهش داد. همچنین با طراحی سیگنال ارسالی و روشهای پردازش سیگنال می توان میزان حضور سیگنال موانع را کم کرد. برای مشخص شدن محل جسم به تعریف دستگاه مختصات نیاز داریم.
_wbgw.jpg)
اندازه گیری فاصله هدف بطور ضمنی در نام رادار نهفته است. اگر چه امروزه رادار های مدرن معمولا پارامترهایی بیشتر از فاصله شعاعی را اندازه گیری می کنند. آنها قادرند موقعیت هدف در فضای سه بعدی، بردار سرعت هدف (شامل سرعت آن در سه مولفه فضا)، جهت زاویه ای و بردار سرعت زاویه ای (نرخ تغییر زاویه در هر دو مولفه زاویه ای) را نیز بدست آورند. تمام این اندازه گیری ها می تواند بطور همزمان برای چند هدف در شرایطی که نویز و موانع نیز حضور دارند، محاسبه شود. اندازه سرعت شعاعی هدف با تغییر فاصله در یک بازه زمانی و یا از طرق شیفت فرکانس داپلر قابل اندازه گیری است. سرعت مطلق و جهت حرکت یک هدف متحرک با ردیابی آن می تواند بدست آید که از اندازه گیری های رادار از محل هدف در یک بازه زمانی محاسبه می شود. به همین روش می توان سرعت زوایه ای را نیز اندازه گیری کرد. بدست آوردن جهت زاویه هدف در یک بعد زاویه ای توسط دو بیم آنتن انجام می شود. این دو بیم به میزان کمی در زاویه جابجا می شوند و با مقایسه اندازه بازگشتی دریافت شده در هر بیم، اندازه زاویه بدست می آید. برای اندازه گیری در هر دو بعد زاویه ای به چهار بیم آنتن نیاز داریم و دقت این اندازه گیری به اندازه آنتن وابسته می باشد . صفحه نمایش رادار برای نشان دادن نتایج بدست آمده به صورت بصری برای کاربر می باشد و دارای انواع مختلفی است. سه نوع از نمایشگرهایی که امروزه در رادارهای کلاسیک بیشتر مورد استفاده قرار می گیرد در اسکوپ تصویر بالا ، جهت عمودی، تابعی از قدرت سیگنال پوش موج بازگشتی از هدف است. این تابعیت می تواند به صورت خطی یا لگاریتمی باشد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی رادار سِرچ های رَهگیر (Radar search) نحوه عملکرد و کاربرد در (علوم مخابرات)
نویسنده: افشین رشید

کاربرد اصلی یک رادار رهگیر که گاهاً از آن به عنوان رادار کنترل آتش نیز استفاده میشود تهیهی مختصات سه بعدی زاویه عمودی، افقی و فاصله از هدف است. این اطلاعات جهت شلیک صحیح گلولههای واحد توپخانه یا موشکهای هدایت شونده ضروری است.پس از تعیین مختصات تقریبی یک هدف توسط رادار جستوجو (سرچ) و مشخص شدن آن به عنوان واحد متخاصم اطلاعات دو بعدی هدف شامل برد و زاویه افقی در اختیار واحد کنترل آتش قرار میگیرد و در این حین رادار دقیقتر یعنی رادار رهگیر شروع به جستوجوی حول مختصات تقریبی می کند تا اطلاعات دقیق هدف را کسب نماید. رادار جست و جو به کمک یک پرتو بادبزنی شکل (باریک در افق پهن در فراز) شروع به جستوجوی 360 درجهای محیط می کند و پس از کشف تقریبی مکان هدف، آنرا به رادار کنترل آتش واگذار میکند، در این حین رادار رهگیر یا کنترل آتش به کمک یه پرتو نوک مدادی (باریک در افق و فراز) مکان دقیق هدف را استخراج مینماید.
دقت رادار رهگیر (Radar search)
دقت رادار رهگیر ارتباط تنگاتنگی با باریک بوودن هرچه بیشتر پرتو نوک مدادی دارد البته ذکر این نکته ضروری است که باریکی بیش از حد پرتو ممکن است باعث گریز هدف از دید رادار و عدم اکتشاف آن گردد.
در رادارهای جستوجوی جدید این امکان فراهم گردید که اطلاعات سه بعدی تقریبی هدف استخراج گردد که این امر به رهگیری هرچه سریعتر هدف میانجامد. البته در برخی سامانهها رادار رهگیر و جست وجو در واقع یک رادار هستند و پس از استخراج اطلاعات سه بعدی تقریبی هدف سامانه وارد حالت رهگیر میشود و پس از استخراج اطلاعات مکانی هدف انرا در اختیار واحد آتش قرار میدهد.
دقت مورد نیاز برای یک رادار رهگیر تا اندازهی زیادی به ماهیت ذاتی واحد درگیر شونده دارد به عنوان مثال یک سامانه توپخانهای انرژی جنبشی با نواخت پایین به مراتب به دقت بالاتری نیاز دارد تا یک واحد موشکی مجهز به موشکهای هدایت شونده با سرجنگی ترکش شونده یا یک توپ گتلینگ مسلح به گلولههای مجهز به فیوز.
چند رادار در این سامانه مشاهده میشود؟ تفاوت هریک در چیست؟
دو عامل مهم دقت رادارهای رگیری را تحت تاثیر قرار میدهد: یکی عوامل ذاتی که به ماهیت و نوع سامانهی راداری بستگی دارد و دیگری عامل خارجی که به ماهیت هدف و نیز وضعیت آب و هوایی بستگی دارد. در حال حاضر انواع متعددی از رادارهای رهگیری در دسترس قرار دارند که دقت، پیکربندی و قیمت آنها متفاوت است. از مهمترین رادارهای رهگیری رادار اسکن نوک مدادی است که در ادامه به تشریح آن میپردازیم.
رادار اسکن نوک مدادی (مخروطی) سیگنال سینوسی
در این نوع رادار جهت پرتو برابر با جهت دید رادار نیست و پرتو حول نقطهی تقریبی هدف به چرخش در میآید. نام گذاری این نوع رادار از آنجایی نشأت میگیرد که دارای پرتویی نوک مدادی شکل چرخند حول محل تقریبی هدف است. زمانی که هدف در نقطهای حول محور پرتو چرخنده باشد توان بازتابیده از آن ثابت خواهد بود (نه ماکزیمم). زمانی که هدف در نقطهی مشخص شده باشد توان بازتابیده از آن به صورت متناوب و مناسب با فرکانش اسکن مخروطی (بسته به سرعت چرخش پرتو) تغییر خواهد کرد.
زمانی که پرتو بازتابیده از هدف دارای بیشترین توان بود محور مرکزی پرتو دقیقا به سمت هدف تابانده شده است با توجه به موارد یادشده و پردازش سیگنال بازتابیده از هدف میتوان اطلاعات مکانی هدف را به طور دقیق استخراج کرد.
چرخش پرتو ممکن است به صورت مکانیکی یا الکترونیکی باشد. در حالت چرخش مکانیکی زاویه محور مرکزی آنتن به دقت و توسط موتورهای سروو حرکت داده میشود.
نوع دیگری از رادارهای اسکن مخروطی نیز وجود دارد که به آنها رادارهای اسکن مخروطی منحصر به گیرنده (Conical scan on receive only (COSRO)) گوییم. در این نوع رادارها فرستنده ثابت بوده و پرتو مخروطی تولید میکند و این آنتن گیرنده است که با چرخش خود در جهتهای مختلف توانهای مختلف بازتابیده از هدف را دریافت کرده مکان هدف را استخراج میکند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی عملکرد و ساختار (رادارهای مونواستاتیک Monostatic)
نویسنده : افشین رشید
نکته : فرکانس هایی که در دسته وی-اچ-اف (VHF ) قرار می گیرند از قابلیت بالایی در کشف اهداف پنهان کار برخوردارند .
رادارهای مونواستاتیک Monostatic
رادارهایی که فرستنده و گیرندهی آنها در یک نقطه واقع است را مونواستاتیک مینامیم. در واقع فاصلهی بین گیرنده و فرستنده در ای رادارها بسیار کوچکتر از فاصله نقطهی استقرار رادار نسبت به هدف است لذا فرستنده و گیرنده یک فضای یکسان را پوشش میدهند. در اغلب موارد فرستنده و گیرندهی رادار مونواستاتیک در یک سامانه تعبیه شده و از یک آنتن استفاده میکنند. جداسازی دو مود کاری گیرندگی و فرستندگی در این رادارهایی که از یک آنتن گیرنده فرستنده استفاده می کنند توسط واحدی به نام سلول گیرنده/فرستنده یا T/R cellیا داپلکسر Duplexer صورت میگیرد. این سلول وظیفه دارد در حالت فرستندگی ورودی گیرنده را بلوکه کند. در این رادارها به کمک اندازهگیری زمان رفت و برگشت سیگنال و ضرب آن در سرعت حرکت موج (سرعت نور) فاصله هدف استخراج میشود. همچنین سرعت هدف را میتوان به کمک خاصیت شیفت داپلر فرکانس اکو هدف محرک تشخیص داد.
کاربرد و کارکرد رادارهای مونواستاتیک
رادار جستجو و نظارت هوایی مونواستاتیک با برد نسبتاً بالا و دو بعدی و همچنین با برد در حدود 300 کیلومتر و سه بعدی و نمونه ای با قابلیت مقابله با جنگ الکترونیک تا 360 کیلومتر و انواعی از رادارهای پسیو است. فرکانس هایی که در دسته وی-اچ-اف قرار می گیرند از قابلیت بالایی در کشف اهداف پنهان کار برخوردارند .
گفتنی است رادارهایی که در آن فرستنده و گیرنده یکی هستند مونواستاتیک، آنهایی که فرستنده و گیرنده در دو نقطه متفاوت و فاصله دار هستند بایاستاتیک و مجموعه هایی با چند گیرنده و چند فرستنده جدا از هم مولتی استاتیک گفته می شود.گفتنی است یکی از روش های پنهان کاری رادار استفاده از سطوح زاویه دار یا منحنی در بدنه هواگرد به طوری است که بازتابش امواج به محل فرستنده برنگردد. با استفاده از رادارهایی با فرستنده و گیرنده فاصله دار که در محل های متفاوتی نصب شده اند، بازتاب های حاصله از هواگرد رادار گریز توسط گیرنده ای دیگر دریافت شده و در نتیجه هدف کشف می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی ساختار و ساختمان داخلی رادار PRF (فرکانس تکرار پالس)
نویسنده: افشین رشید
رادار ها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند .
_ موج رادار پالسی رادار موج پیوسته(سینوسی)
مکانیسم عمل همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند. به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که آیا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند ؛ حتی سرعت جسم نیز بخوبی قابل محاسبه است.کاربرد ها نظارت و رهگیری هواپیماها و موشکها نظارت و رهگیری اهداف دریایی یا زمینی نظارت و رهگیری اجرام فضایی هواشناسی اندازه گیری سرعت وسایل نقلیه رادار؛ برای تصویر دو-بعدی و سه-بعدی پیداکردن مین در زمین فرود(برای نمونه برای هواپیما) دقیق عکسبرادری از کرههای دیگر با رادار تصویری پرهیز تصادم پیدا کردن آب در مناطق شنزار و خشک نظارت بر اهداف جنبنده در زمین نظارت بر اهداف جنبنده در مناطق پردرخت و جنگل های انبوه از موارد کاربرد رادار میباشد.
رادارهای پالسی (Pulse Transmission)
در این رادارها موج ارسالی به صورت یک پالس با فرکانس مشخص به نام PRF(فرکانس تکرار پالس) می باشد. نسبت دوره تناوبPRT زمان تکرار پالس به عرض پالس را نسبت به زمان کار می گویند. رادارهای پالسی با توجه به دوره تناوب و نسبت زمان کار دارای تنوع بوده که به مواردی از آنها اشاره می شود :
۱- رادارهای پالسی معمولی . در این رادارها معمولا عرض پالس در حدود چند میکروثانیه است و نسبت زمان کار بین حدود ۰٫۰۱ تا ۰٫۰۰۱ تغییر می کند. از این رادارها جهت هواشناسی و دیده بانی و مراقبت هوایی استفاده می شود.
۲- رادارهای پالسی با قدرت تفکیک بالا (High Resolution). در این رادارها عرض پالسی بسیار کوچک انتخاب می شود و چون میزان دقت در تشخیص فاصله توسط عرض پالسی مشخص می گردد دارای دقت بالایی در تشخیص فاصله هدف می باشد. (هر قدر عرض پالس کوچکتر باشد محاسبه فاصله دقیقتر است.) این رادارها برای آشکار سازی اهداف ساکن در حضور کلاتر (سیگنالهای برگشتی ناخواسته به صفحه رادار) و نیز تشخیص یک هدف در میان چند هدف نزدیک به هم قابل استفاده می باشد.
۳- رادار پالس فشرده(Pulse Compression) . این رادار از پالس های با عرض زیاد استفاده می نماید و برای افزایش دقت از مدولاسیون فاز یا فرکانس در هر پالس استفاده می کند. در نتیجه ضمن افزایش پهنای باند تشخیص دقیق فاصله اهداف نیز حاصل می شود و نسبت به رادار نوع قبلی دارای این مزیت است که توان پیک (حداکثر توان) فرستنده را در حد معتدلی نگاه می دارد .
رادار موج پیوسته (CW)
این رادار دارای نسبت زمان کار واحد می باشد،یعنی موج ارسالی به صورت پیوسته است . این نوع رادار نیز دارای انواع مختلف به ترتیب زیر است :
۱- رادار موج پیوسته معمولی : در این نوع رادار می توان سرعت و جهت حرکت هدف را در راستای خط واصل رادار تشخیص داد و امکان تشخیص فاصله به دلیل عدم استفاده از هرگونه مدولاسیون وجود ندارد و معمولا در ناوبری هوایی کاربرد دارند .
۲- رادار موج پیوسته مدوله شده فرکانس : در این رادار از مدولاسیون فرکانس برای افزایش پهنای باند و ایجاد امکان تشخیص فاصله استفاده می شود. از مهم ترین کاربردهای این نوع رادار ارتفاع سنجهای هواپیما می باشد.
۳- رادار موج پیوسته چند فرکانسه : در این نوع رادار با توجه به اختلاف فاز موج دریافتی از یک هدف در فرکانسهای مختلف می توان فاصله هدف را تشخیص داد.
رادار روزنه مصنوعی (Synthetic Aperture Radar)
در این رادار معمولا بیم آنتن در جهت عمود بر مسیر حرکت تنظیم می شود و دارای دقت بالایی در زاویه است .
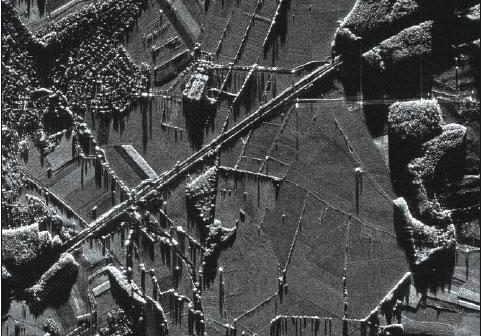
عملکرد آنها مانند یک آنتن ساکن با تعداد زیادی آرایه می باشد. خروجی این نوع رادار یک تصویر با دقت بالا از صحنه ی مورد نظر می باشد. رادار های فوق به دلیل ایجاد تصاویر دقیق کاربرد های فراوانی در علم زمین شناسی و جغرافی و همچنین در امور نظامی پیدا کردند. این رادار حتی قادر به ایجاد تصاویر سه بعدی از اشیا و اهداف می باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات ) انواع رادار و اهداف آن (رادار فرستنده گیرنده پالسی p و مونو استاتیکP6FP)
نویسنده : افشین رشید
_i05.png)
انواع رادار و اهداف آن بر اساس معیارهای گوناگون می توان دسته بندی های متفاوتی را برای بیان انواع رادار ارائه داد. رادار هایی که P و رادار هایی که فرستنده و گیرنده آنها در دو فرستنده و گیرنده آنها در یک محل می باشد رادارهای مونو استاتیک P6FP نامیده می شوند. در حالت اول فاصله هدف از فرستنده و گیرنده یکسان محل متفاوت واقع شده است، بای P7F استاتیک است اما در حالت بای استاتیک اینطور نیست. در مونواستاتیک که معمولا رادارها از این نوع هستند، برای ارسال و دریافت از یک آنتن استفاده می شود.در مواردی یک سیستم رادار دارای بیش از یک فرستنده و گیرنده می باشد که به صورت P خوانده می شود. یک شبکه عمل می کنند. این سیستم P8F ها مولتی استاتیکP ، راداری است که به طور همچنین رادارها را می توان براساس سیگنال ارسالی آنها دسته بندی کرد. نوع CWP9F پیوسته و معمولا با دامنه ثابت ارسال می کند. این سیگنال ارسالی می تواند با مدولاسیون FM و یا با فرکانسی ثابت فرستاده شود. هنگامی که شکل موج ارسالی به صورت پالسی است ( بامدولاسین FM و یا بدون آن) ، رادار پالسی P و غیر فعالP1F نامیده میشود. همچنین بر اساس وجود فرستنده یا نبود آن، رادارها بترتیب به دو دسته فعال P10FP تقسیم می شوند.بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. P نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
اهداف متحرک اهدافی هستند که نسبت به رادار دارای حرکت اند. اگر رادار بر روی زمین به طور ساکن باشد، اهداف طبیعی مانند جنگل یا زمین چمنزار حرکات نسبتا کندی را دارا هستند و پخش شدگی کمی در طیف فرکانسی سیگنال دریافتی ایجاد می کنند. باران و شکل های مشابه نیز دارای چنین حالتی هستند. قابل توجه بودن اثر سایر پدیده های آب و هوایی مانند طوفان، گردباد و غیره به فرکانس کاری رادار بستگی دارد. اهدافی مانند موشک، هواپیمای جت، ماهواره ها به میزانی سریع هستند که جابجایی طیفی قابل توجهی (ناشی از داپلر) در سیگنال دریافتی نسبت به سیگنال ارسالی ایجاد می کنند. در حالاتی که رادار متحرک است تمامی اهداف ساکن بر روی زمین متحرک در نظر گرفته می شوند. در ایجاد داپلر سرعت نسبی رادار و هدف نسبت به هم مطرح می باشد . دسته بندی دیگر اهداف رادار، فعال یا غیر فعال بودن آنهاست. به اهدافی که از خو د انرژی تشعشع می کنند فعال گفته می شود. سایر اهداف غیر فعال هستند. یک رادار برای سیستم راداری دیگر هدفی فعال بشمار می رود. از جمله اهداف فعال می توان بدن انسان را نیز نام برد. رادارهایی که با طول موج مادون قرمز کار می کنند می توانند تشعشعات ناشی از حرارت بدن را دریافت کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی رادارهای پالسی با قدرت تفکیک بالا (High Resolution)
نویسنده : افشین رشید
در این رادارها عرض پالسی بسیار کوچک انتخاب می شود و چون میزان دقت در تشخیص فاصله توسط عرض پالسی مشخص می گردد دارای دقت بالایی در تشخیص فاصله هدف می باشد. (هر قدر عرض پالس کوچکتر باشد محاسبه فاصله دقیقتر است.) این رادارها برای آشکار سازی اهداف ساکن در حضور کلاتر (سیگنالهای برگشتی ناخواسته به صفحه رادار) و نیز تشخیص یک هدف در میان چند هدف نزدیک به هم قابل استفاده می باشد.در مواردی یک سیستم رادار دارای بیش از یک فرستنده و گیرنده می باشد که به صورت پالسی خوانده می شود. یک شبکه عمل می کنند. این سیستم P8F ها مولتی استاتیک پالسی، راداری است که به طور همچنین رادارها را می توان براساس سیگنال ارسالی آنها دسته بندی کرد. نوع CWP9F پیوسته و معمولا با دامنه ثابت ارسال می کند. این سیگنال ارسالی می تواند با مدولاسیون FM و یا با فرکانسی ثابت فرستاده شود. هنگامی که شکل موج ارسالی به صورت پالسی است ( بامدولاسین FM و یا بدون آن) ، رادار پالسی P و غیر فعالP1F نامیده میشود. همچنین بر اساس وجود فرستنده یا نبود آن، رادارها بترتیب به دو دسته فعال P10FP تقسیم می شوند.
بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.
اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. پالسی نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی رادار پالس فشرده(Pulse Compression)
نویسنده : افشین رشید
این رادار از پالس های با عرض زیاد استفاده می نماید و برای افزایش دقت از مدولاسیون فاز یا فرکانس در هر پالس استفاده می کند. در نتیجه ضمن افزایش پهنای باند تشخیص دقیق فاصله اهداف نیز حاصل می شود و نسبت به رادار نوع قبلی دارای این مزیت است که توان پیک (حداکثر توان) فرستنده را در حد معتدلی نگاه می دارد .رادار ها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند.مکانیسم عمل همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند.
معمولاً، سیستمهای (رادار پالس فشرده) فرآیند مشابهی را در حوزه دیجیتال به نام فیلتر همسان به کار میگیرند ، جایی که سیگنال دریافتی با نسخه معکوسشده زمان پالس ارسالی در هم میآید. فیلتر تطبیقی اغلب در حوزه فرکانس انجام می شود زیرا پیچیدگی در حوزه زمان معادل ضرب در حوزه فرکانس است و فرآیند را سریعتر می کند. از آنجایی که پالس اولیه با زمان معکوس است، خروجی فیلتر شده با عرض پالس که همان 1 ثانیه است به تاخیر می افتد.به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که آیا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند ؛ حتی سرعت جسم نیز بخوبی قابل محاسبه است.کاربرد ها نظارت و رهگیری هواپیماها و موشکها نظارت و رهگیری اهداف دریایی یا زمینی نظارت و رهگیری اجرام فضایی هواشناسی اندازه گیری سرعت وسایل نقلیه رادار؛ برای تصویر دو-بعدی و سه-بعدی پیداکردن مین در زمین فرود(برای نمونه برای هواپیما) دقیق عکسبرادری از کرههای دیگر با رادار تصویری پرهیز تصادم پیدا کردن آب در مناطق شنزار و خشک نظارت بر اهداف جنبنده در زمین نظارت بر اهداف جنبنده در مناطق پردرخت و جنگل های انبوه از موارد کاربرد (رادار پالس فشرده) میباشد.
فشرده سازی پالس با مدولاسیون فرکانس غیر خطی مزایای واضحی دارد. برای مثال، دیگر نیازی به وزن دهی دامنه ای برای سرکوب لوب های جانبی به دست آمده، به اصطلاح لوب های کناری زمانی ندارد، زیرا شکل مدولاسیون از قبل عملکرد وزن دهی دامنه لازم را انجام می دهد.تنظیم فیلتر با لبه های بسیار تندتر و با این وجود لوب های جانبی کم در حال حاضر امکان پذیر است. به این ترتیب، از تلفات نسبت سیگنال به نویز که در غیر این صورت به دلیل وزن دهی دامنه رخ می دهد، جلوگیری می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادارهای GPR (رادار آنالیز زمین برای اکتشاف) آشنایی ،نحوه عملکرد، کاربرد ها
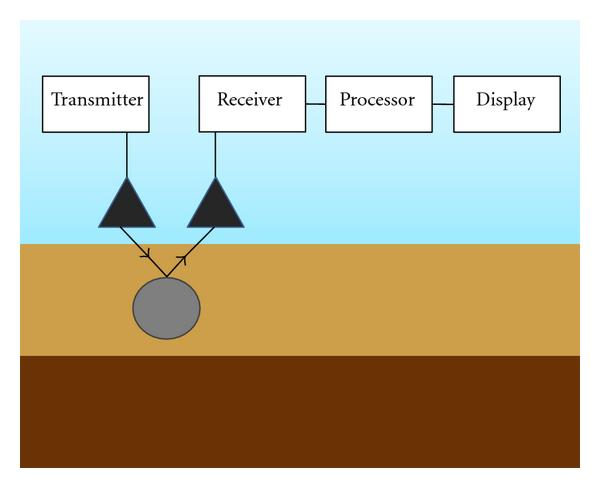
نکته: رادار نافذ زمین GPR یک روش ژئوفیزیکی غیر مخرب است که بدون ایجاد مزاحمت در زمین ، امواج پروفیل مقطعی تولید می کند.
از پروفایل های GPR برای ارزیابی مکان و عمق اشیاء مدفون و برای بررسی حضور و تداوم شرایط و ویژگی های زیرسطحی طبیعی استفاده می شود. GPR با انتقال پالسهای امواج رادیویی با فرکانس بالا از طریق مبدل یا آنتن ، به داخل زمین عمل می کند. انرژی منتقل شده از اشیاء مختلف دفن شده یا با تماس های مشخص بین مواد مختلف زمین بازتاب می یابد. سپس آنتن موج های منعکس شده را دریافت می کند و آنها را در رایانه ذخیره می کند.رادار نفوذی زمین GPR روشی ژئوفیزیکی بر پایـه انتـشار امـواج الکترو مغناطیسی است که درحکم روشی غیرمخرب بـرای به تصویر در آوردن لایه ها و بی هنجاری های زیرسطحی به کار می رود.ایـن روش بـه ســرعت بــه منزلــۀ یــک روش قابــل اعتمــاد در زمینــه هــای مهندسی عمران، باستان شناسی و کاربردهای دیگر شـناخته شده است .به طورکلی موفقیت در روش GPR ،به عواملی همچـون جنس خاک منطقه، نوع بی هنجاری و هدف مورد بررسی، طراحی صحیح عملیات برداشت و انتخاب درست آنـتن و درنهایت به کارگیری پارامترهای پردازشی مناسـب وابـسته اســت. دو عامــل خــاک محــل برداشــت و هــدف مــورد بررسی، عوامل خارج از کنترل هستند .
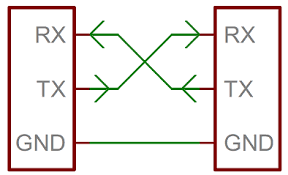
نکته : Rx به معنای امواج گیرنده حامل و TX به معنای امواج فرستنده حامل میباشد .که این (بسامد) در سیستم شناسایی رادار GPR مورد استفاده قرار میگیرد.
انتخاب آنتن با توجـه بـه حـد تفکیـک هـر آنـتن ، اهمیـت زیادی دارد پردازش در GPR باید با توجه به شرایط ویژه هــر تحقیــق انجــام پــذیرد؛ چرا کــه بــه همــان انــدازه کــه به کارگیری پارامترهای پردازشی مناسب ممکن است مفید باشد؛ پردازش نامناسب میتواند گمراه کننده باشد. ایجاد مسیرهای جدید برای کابـل و یـا لولـه گـذاری در زیر زمین و همچنـین نگهـداری از تاسیـسات زیرسـطحی و محافظــــت از آن، هنگــــام عملیــــات خــــاکبرداری و ساخت و ساز، نیازمند داشتن آگـاهی کامـل از محـل دقیـق تاسیـسات زیـر سـطحی اسـت. توانـایی GPR بـا توجـه بـه وضوح رادارگرام ها، باعث شده است که این روش به منزلۀ روشی با دقت زیاد، در مکـان هـایی ماننـد خیابـان هـای پر تردد و یا سازه های عظیم به کار رود.
_(1)_rytg.png)
(بلوک دیاگرام) رادار های GPR (رادار آنالیز زمین برای اکتشاف)
در این روش آنتن هایی با پهناهای نوار بسامدی متفاوت(10-2000 مگاهرتز ) به کار گرفته می شود. طیف بسامدی با نام بسامد مرکزی آنتن استفاده شده در برداشت مشخص میشود. بسامد مرکزی، هم عمق نفـوذی موجـک GPR و هم تفکیک پذیری زمـانی و مکـانی رادار گـرام هـا را معـین مــیکنــد.(بنــابر ایــن چگونگی انتخاب آنتن، اصلی ترین عامل در برداشت هـای رادار به شمار می آید. برای مکان یابی بی هنجـاری هـایی بـا اندازه های متفاوت و طبیعتاً در عمـق هـای گونـاگون، یـک سری از مقاطع رادار برداشت شده بـا آنـتن هـای گونـاگون لازم است در برخـی از پروژه ها بـه جـای اسـتفاده از چنـد آنـتن بـا بـسامدهـای گوناگون ، از روشی به نام ترکیب چند بسامدی (Multiple compositing frequency) اسـتفاده مـی شود اگر چـه روش ترکیـب بـه منزلـۀ روشـی کم هزینه، می تواند تا حد مطلوبی موجب افزایش کیفیت و وضوح رادار گرام شود اما روش سـخت افـزاری اسـتفاده از چند آنتن و سـپس بـه کـارگیری پـردازش هـای خـاص هـر آنتن، مزیت های بیشتری از جمله کیفیت داده هـا و وضـوح بیشتر رادار گرام ها را دارد. این موضوع به یک تفسیر جامع برگرفته از چنـد رادار گـرام بـا آنـتن هـای گونـاگون منجـرخواهد شـد. اگـر نوارهـای بـسامدی، بـا توجـه بـه عمـق و چگونگی اهداف مورد بررسی، به درستی انتخاب شـوند و برای یک بررسی مـوردی از چنـدین آنـتن بـا بـسامد هـای مرکـزی متفـاوت اسـتفاده شـود،آنگاه در حین اکتشاف دارای حساسیت در عمق بیشتری خواهد بود.
آنتن GPR در واقع پالس انرژی الکترومغناطیسی را به داخل زمین منتقل می کند. هنگامی که این انرژی به یک جسم می رسد ، پژواک می شود و توسط گیرنده آنتن اسیر می شود. نرم افزارهای رایانه ای از فرکانس پالس های منتقل شده و میزان تأخیر زمانی بین انتقال پالس ها و دریافت ها برای تهیه اطلاعات در مورد هدف استفاده می کنند. دامنه و وضوح عمق مربوط به فرکانس رادار ، قدرت انتقال یافته ، خاصیت الکترومغناطیسی مواد زمینی (خاک) و همچنین به شکل و مشخصات اهداف است.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی و آشنایی با روش رادار نفوذی زمین GPR امواج اِکتشافی (علوم مخابرات) قدرت نفوذ و ضریب توان
نویسنده: افشین رشید
_fwrf.jpeg)
Ground Penetrating Radar (GPR) یا روش رادار نفوذی زمین یکی از روشهای ژئوفیزیکی با قدرت تفکیک بالا است که توسط امواج الکترومغناطیسی با فرکانس بالا، تغییرات خواص الکتریکی را در اعماق کم آشکارسازی میکند. این روش کاربرد گسترده ای در اکتشاف کانسارهای متعدد فلزی و غیرفلزی، تعیین موقعیت حفره های کارستی، اکتشاف منابع آب زیر زمینی، مکان یابی تاسیسات زیرزمینی مانند لوله، کابل، کانال، قنات و شناسایی شکستگی ها و درز و شکاف ها دارد. از مزایای نسبت به دیگر روش های ژئوفیزیک اکتشافی و مهندسی، می توان به غیر مخرب بودن، دقت و قدرت تفکیک بالا، برداشت سریع و ارزان اشاره کرد. در این روش، امواجی از دستگاه GPR ساطع شده و به داخل زمین نفوذ میکند. این امواج در برخورد با ناپیوستگیها، به دلیل تغییر در گذردهی الکتریکی در دو طرف مرز مشترک دو محیط، بازتاب میشوند. بازتابشها توسط دستگاه دریافت شده و با توجه به سرعت این امواج که در محیطهای مختلف متفاوت است میتوان اطلاعاتی مانند جنس محیط، عمق مواد مدفون، موقعیت مرز لایههای درون زمین و … را به دست آورد.
_km50.png)
قدرت نفوذ و دقت روش GPR
قدرت نفوذ و دقت روش GPR وابسته به فرکانس موجی است که توسط دستگاه به درون زمین ارسال میشود. هر چه این موج فرکانس پایینتری داشته باشد، قدرت نفوذ آن افزایش مییابد و میتوان لایههای عمیقتری از زمین را توسط این موج شناسایی نمود. اما در مقابل قدرت تفکیک و در نتیجه دقت روش کمتر میشود. یعنی در اعماق کمتر قدرت تفکیک بالاتری وجود دارد و اجسام با ابعاد کوچک تر را نیز میتوان شناسایی نمود. اما هر چه عمق بیشتر میشود، اجسام باید ابعاد بزرگتری داشته باشند تا توسط این روش قابل شناسایی باشند.
دستگاههای GPR معمولا دارای آنتنهای مختلف میباشند. هر کدام از این آنتنها قادر هستند تا موج با فرکانس خاصی را از خود ساطع کنند. با توجه به موارد گفته شده، هر کدام از این آنتنها جهت شناسایی هدف خاصی مورد استفاده قرار میگیرند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی ساختار و ساختمان داخلی (رادار دهانه ترکیبی) Synthetic-aperture radar رادار روزنه مصنوعی و فناوری سار (آرایه ترکیبی SAR)
نویسنده: افشین رشید
نکته: (رادار دهانه ترکیبی) Synthetic-aperture radar رادار روزنه مصنوعی و فناوری سار هم نامیده می شود با تکیه بر همان فناوری رادار در حال تصویر برداری است و نهایتاً یک تصویر دو بعدی تولید می کند.
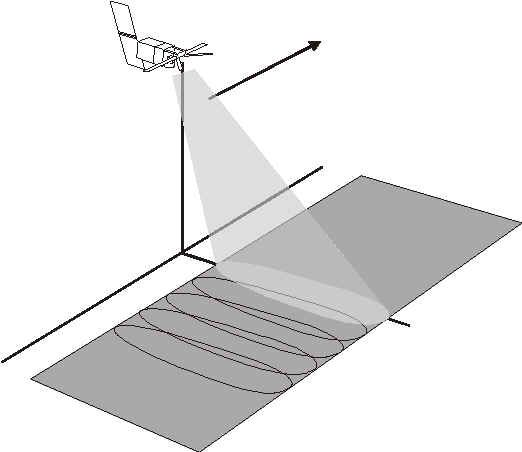
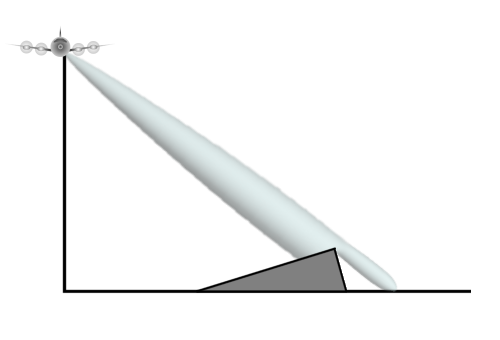
(رادار دهانه ترکیبی) Synthetic-aperture radar برای تهیهی یک نقشه دقیق از زمین و عوارض موجود در آن لازم است از یک آنتن طویل استفاده کنیم اما امکان ساخت و بکارگیری راداری با آنتن بزرگ جهت دستیابی به رزولوشن بالا از عوارض زمینی امکانپذیر نیست. برای تهیه ی یک نقشه دقیق از زمین و عوارض موجود در آن لازم است از یک آنتن طویل استفاده کنیم اما امکان ساخت و بکارگیری راداری با آنتن بزرگ جهت دستیابی به رزولوشن بالا از عوارض زمینی امکانپذیر نیست. برای رفع این مشکل از تکنیک ردار دریچه مصنوعی یا SAR استفاده میشود. در این تکنیک هواگرد در حال حرکت اقدام به ارسال دریافت امواج کرده و بدین ترتیب یک آنتن طویل شبیه سازی میشود.
برای رفع این مشکل از تکنیک ردار دریچه مصنوعی یا SAR استفاده میشود. در این تکنیک هواگرد در حال حرکت اقدام به ارسال دریافت امواج کرده و بدین ترتیب یک آنتن طویل شبیه سازی می شود.رادار ها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند.
_bvik.png)
بر اساس یک تقسیم بندی کلاسیک، رادار های تصویرگر را میتوان به دو دسته بزرگ یعنی رادار های آرایه – حقیقی (RAR) و رادار های آرایه – ترکیبی (SAR) تقسیم بندی کرد که هر کدام ویژگی ها و اهمیت خاص خود را دارند. رادار های روزنه مصنوعی یا همان سار Synthetic Aperture Radar به نوعی از رادار ها اطلاق میشود که برای امور نقشه برداری و تصویر برداری از سطح زمین به کار می رود. معمولا این فن آوری در هواپیماهای شناسایی با اهداف نظامی و غیر نظامی کاربرد دارد.در این رادار ها موج ارسالی به صورت یک پالس با فرکانس مشخص به نام PRF(فرکانس تکرار پالس) می باشد. نسبت دوره تناوبPRT زمان تکرار پالس به عرض پالس را نسبت به زمان کار می گویند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی کاربرد (مخابرات _سونار) در اقیانوس و دریا
نویسنده : افشین رشید
نکته: یکی از اولین چیزهایی که اکثر مردم در مورد (الکترونیک _ امواج ارتباطی ) دریایی فکر میکنند، VHF است.
سیستم مخابراتی باند VHF و (SSBـHF / MF) همچنین باید اولین موردی باشد که درهنگام نصب یا ارتقای سامانه های مخابراتی الکترونیکی در هر کشتی، و سیستم مخابراتی ناوبری به کار گرفته شود . با این حال، برای بسیاری از دریانوردان، نیازهای مخابرات دریایی خود را فراتر از محدوده VHF گسترش میدهند. برای این افراد، باید یک باند متوسط / بسامد متوسط (SSBـHF / MF) مورد توجه قرار گیرد.رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپرکانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است .استفاده های معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی سیستم ناوبری استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.
رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده ازخاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپر کانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است.استفادههای معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی شما استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده از خاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.
اساساً 4 دسته ارتباطات دریایی وجود دارد:
شرایط اضطراری
شرایط فوری
شرایط ایمنی
شرایط عادی (معمولی)
در داخل این دسته ها از 3 سیگنال اضطراری شناخته شده بین المللی برای ارتباطات صوتی استفاده میشود:
MAYDAY با تلفظ DAYـMAY :این سیگنال شرایط اضطراری است و تنها نشان میدهد که کشتی در شرایط خطرناک قرار گرفته و نیاز به کمک فوری دارد.
PANـPAN :این سیگنال شرایط فوری است و زمانی استفاده میشود که ایمنی کشتی یا فرد در معرض خطر باشد.
SECURITE با تلفظ ”TAY – A – CURE – SAY :”این سیگنال شرایط ایمنی است و برای مشاوره دادن به دیگران در مورد ناوبری مهم یا هشدارهای آب و هوایی که ممکن است ایمنی دیگر کشتیها را تحت تأثیر قرار دهد مورد استفاده قرار میگیرد. وضعیت اضطراری در داخل سه دسته تقسیم شده است، به این معنی که هرکدام از این تماس ها باید در کانال 16 ایجاد شود، زیرا بسیاری دیگر ایستگاه های ساحلی در بسامد 7.24 به گوش هستند.
_fg43.png)
اولویت این سیگنال ها به ترتیب زیر میباشد:
ایمنی (SECURITE )بالاتر از هر ارتباطی عادی (معمولی) است.
ارتباطات فوری (PANـPAN )مقدمه ای بر ارتباطات ایمنی میشود.
ارتباط اضطراری (MAYDAY )بالاتر از همه دسته های دیگر ارتباطات است. دسته ارتباطات دریایی وجود دارد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی ساختمان داخلی ( رادار هواشناسی یا Meteorological radar ) از دو قطبی شدن نبض رادار (گیرنده _ فرستنده) استفاده میکند.
نویسنده: افشین رشید
نکته : سیستم های راداری داپلر با طراحی خود می توانند اطلاعاتی راجع به حرکت اهداف و همچنین موقعیت آنها ارائه دهند. وقتی پالس امواج رادیویی را منتقل می کند ، سیستم فاز (شکل ، موقعیت و فرم) آن پالس ها را ردیابی می کند . رادار های هواشناسی توانایی شناسایی حرکت قطره های باران و شدت بارش را دارند. هر دو نوع این اطلاعات می تواند برای تعیین ساختار طوفان و پتانسیل آن برای ایجاد هوای بد تحلیل شود.
با اندازه گیری شیفت (یا تغییر) فاز بین یک پالس منتقل شده و یک پژواک دریافتی ، حرکت هدف مستقیماً به سمت یا دور شدن از رادار محاسبه می شود. سپس این یک سرعت را در امتداد جهتی که رادار نشان می دهد ، فراهم می کند که سرعت شعاعی نامیده می شود. تغییر فاز مثبت به معنای حرکت به سمت رادار و تغییر منفی نشان دهنده حرکت به دور از رادار است.علاوه بر این ، رادار هواشناسی یا Meteorological radar از دو قطبی شدن نبض رادار (گیرنده _ فرستنده) استفاده میکند.رادار هواشناسی یا Meteorological radar به پیش بینی کنندگان شرایط آب و هوایی کمک می کند تا باران ، تگرگ ، برف ، خط باران / برف و گلوله های یخی را برای پیش بینی انواع آب و هوا شناسایی کنند.یکی دیگر از مزایای مهم رادار هواشناسی یا Meteorological radar با وضوح بیشتری بقایای گردباد موجود در هوا (توپ آوار) را تشخیص می دهد - به پیش بینی کنندگان اجازه می دهد تا تأیید کنند که گردباد روی زمین است و باعث آسیب می شود تا بتوانند با اطمینان بیشتری به جوامع موجود در این مسیر هشدار دهند. این امر مخصوصاً در شب هنگامی که لکه های زمینی قادر به دیدن گردباد نیستند بسیار مفید است.
اصول رادارها این است که پرتویی از انرژی به نام امواج رادیویی از آنتن ساطع می شود. هنگامی که آنها به اشیا objects موجود در جو برخورد می کنند ، انرژی در همه جهات پراکنده می شود و مقداری از انرژی مستقیماً به سمت رادار منعکس می شود.هرچه جسم بزرگتر باشد ، میزان انرژی برگشتی به رادار نیز بیشتر خواهد بود. این توانایی را برای ما فراهم می کند تا قطرات باران را در جو مشاهده کنیم. علاوه بر این ، مدت زمانی که پرتوی انرژی برای انتقال و بازگشت به رادار نیز نیاز دارد ، با فاصله تا آن جسم است.اثر تغییر فاز مشابه "تغییر داپلر" است که با امواج صوتی مشاهده می شود. با "تغییر داپلر" ، به دلیل فشرده سازی (تغییر فاز) امواج صوتی ، صدای صوتی جسمی که به سمت مکان شما حرکت می کند بیشتر است . هنگامی که یک شی از مکان شما دور می شود ، امواج صوتی کشیده می شوند و در نتیجه فرکانس کمتری ایجاد می کنند.احتمالاً این اثر را از وسیله نقلیه یا قطار اضطراری شنیده اید. هنگامی که وسیله نقلیه یا قطار از مکان شما عبور می کند ، آژیر یا سوت هنگام عبور جسم پایین می آید.پالس های رادار داپلر به طور متوسط حدود 450000 وات قدرت انتقال دارند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات)بررسی تخصصی و کامل از (رادارهای اهداف وسیع P17)
نویسنده : افشین رشید
نکته:در ساختار رادارهای رادارهای (اهداف وسیع P17) گستردگی این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد.
مهمترین اعمالی که یک رادارهای (اهداف وسیع P17) می تواند انجام دهد عبارتند از : 1 -واضح سازی اهداف ، 2 -آشکارسازی ، 3 -اندازه گیری ، 4 -دسته بندی
واضح سازی اهداف مربوط به توانایی رادارهای (اهداف وسیع P17) در جداسازی سیگنال هدف مطلوب از دیگر اهداف و جداسازی سیگنال مطلوب از سیگنالهای نامطلوب (نویز و موانع) می باشد . در حالت ایده آل می خواهیم که سیگنال اهداف مختلف مستقل از نزدیکی آنها به یکدیگر، از هم متمایز باشند . یکی از عوامل موثر در قابلیت تمایز بین اهداف، سیگنال ارسالی است. پهنای باند بزرگتر برای سیگنال ارسالی وضوح بهتری در پارامتر فاصله را در پی دارد. در حالیکه طول پالس طولانی تر منجر به وضوح بیشتری در فرکانس می گردد. همچنین خصوصیات آنتن نیز در آن موثر است. آنتن ها یی با پهنای باند فضایی کوچک وضوح بهتری را در موقعیت هدف نتیجه می دهد. عمل آشکارسازی شامل تشخیص حضور سیگنال بازگشتی از هدف مطلوب است. این مسئله به ظاهر ساده بنظر می رسد، اما در عمل به علت وجود سیگنال های ناخواسته و نویز گیرنده، عملی پیچیده است. می توان با طراحی مناسب گیرنده و ارسال سیگنالی با انرژی بیشتر در هر پالس اثر نویز را کاهش داد. همچنین رادارهای (اهداف وسیع P17) با طراحی سیگنال ارسالی و روشهای پردازش سیگنال می توان میزان حضور سیگنال موانع را کم کرد. برای مشخص شدن محل جسم به تعریف دستگاه مختصات نیاز داریم.
رادارهای (اهداف وسیع P17) قادرند موقعیت هدف در فضای سه بعدی، بردار سرعت هدف (شامل سرعت آن در سه مولفه فضا)، جهت زاویه ای و بردار سرعت زاویه ای (نرخ تغییر زاویه در هر دو مولفه زاویه ای) را نیز بدست آورند. تمام این اندازه گیری ها می تواند بطور همزمان برای چند هدف در شرایطی که نویز و موانع نیز حضور دارند، محاسبه شود. اندازه سرعت شعاعی هدف با تغییر فاصله در یک بازه زمانی و یا از طرق شیفت فرکانس داپلر قابل اندازه گیری است. سرعت مطلق و جهت حرکت یک هدف متحرک با ردیابی آن می تواند بدست آید که از اندازه گیری های رادار از محل هدف در یک بازه زمانی محاسبه می شود. به همین روش می توان سرعت زوایه ای را نیز اندازه گیری کرد.
![]()
در رادارهای (اهداف وسیع P17) بدست آوردن جهت زاویه هدف در یک بعد زاویه ای توسط دو بیم آنتن انجام می شود. این دو بیم به میزان کمی در زاویه جابجا می شوند و با مقایسه اندازه بازگشتی دریافت شده در هر بیم، اندازه زاویه بدست می آید. برای اندازه گیری در هر دو بعد زاویه ای به چهار بیم آنتن نیاز داریم و دقت این اندازه گیری به اندازه آنتن وابسته می باشد . صفحه نمایش رادار برای نشان دادن نتایج بدست آمده به صورت بصری برای کاربر می باشد و دارای انواع مختلفی است. سه نوع از نمایشگرهایی که امروزه در رادارهای کلاسیک بیشتر مورد استفاده قرار می گیرد در اسکوپ تصویر بالا ، جهت عمودی، تابعی از قدرت سیگنال پوش موج بازگشتی از هدف است. این تابعیت می تواند به صورت خطی یا لگاریتمی باشد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات ) بررسی انواع رادار و اهداف آن (رادارهای آشکارساز P12 ،جست و جوگر P13 ردیاب ، P14 و غیره P15)
نویسنده: افشین رشید

نکته : انواع رادار و اهداف آن بر اساس معیارهای گوناگون می توان دسته بندی های متفاوتی را برای بیان انواع رادار ارائه داد. رادار هایی که P و رادار هایی که فرستنده و گیرنده آنها در دو فرستنده و گیرنده آنها در یک محل می باشد رادارهای مونو استاتیک PF نامیده می شوند.
دسته بندی دیگر اهداف رادار، فعال یا غیر فعال بودن آنهاست. به اهدافی که از خو د انرژی تشعشع می کنند فعال گفته می شود. سایر اهداف غیر فعال هستند. یک رادار برای سیستم راداری دیگر هدفی فعال بشمار می رود. از جمله اهداف فعال می توان بدن انسان را نیز نام برد. رادارهایی که با طول موج مادون قرمز کار می کنند می توانند تشعشعات ناشی از حرارت بدن را دریافت کنند.
بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.
اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. P نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
اهداف متحرک اهدافی هستند که نسبت به رادار دارای حرکت اند. اگر رادار بر روی زمین به طور ساکن باشد، اهداف طبیعی مانند جنگل یا زمین چمنزار حرکات نسبتا کندی را دارا هستند و پخش شدگی کمی در طیف فرکانسی سیگنال دریافتی ایجاد می کنند. باران و شکل های مشابه نیز دارای چنین حالتی هستند. قابل توجه بودن اثر سایر پدیده های آب و هوایی مانند طوفان، گردباد و غیره به فرکانس کاری رادار بستگی دارد. اهدافی مانند موشک، هواپیمای جت، ماهواره ها به میزانی سریع هستند که جابجایی طیفی قابل توجهی (ناشی از داپلر) در سیگنال دریافتی نسبت به سیگنال ارسالی ایجاد می کنند. در حالاتی که رادار متحرک است تمامی اهداف ساکن بر روی زمین متحرک در نظر گرفته می شوند. در ایجاد داپلر سرعت نسبی رادار و هدف نسبت به هم مطرح می باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
از بین بردن در همریختگی ناشی از اهداف ثابت در انواع مختلف رادارها و سونارهای دریایی active sonar ؛ passive sonar (علوم مخابرات)
نویسنده: افشین رشید
(تفاوت رادار با سونار sonar) بلوک دیاگرام یک رادار نسبتاً پیشرفته نشانگر از استفاده بخش ها و ماژول های مخابراتی مختلف در آن از (داپلکسر تا میکسر ) و نهایتاً Antena
تکنولوژی سونار چیست؟
سونار (sonar) ، ناوبری و تشخیص فاصله توسط صوت ( sound navigation and ranging)، تکنولوژی است که با استفاده از انتشار صدا در زیر آب قادر به شناسایی دیگر ناوها یا کشتی ها است
امروزه فیلترهای شانه ای در کاربرد های گسترده ای نظیر حذف نمودن هارمونیک های خطوط تغذیه و از بین بردن در همریختگی ناشی ازاهداف ثابت در رادارها و سونارهای نشان دهنده هدف متحرک استفاده می شوند.
تصویربرداری از اهداف زیر آب با استفاده از امواج صوتی، (sonar )
تصویربرداری از اهداف زیر آب با استفاده از امواج صوتی، مشابه روش به کار رفته در رادار روزنه مصنوعی، امکان پذیر است و در سال های اخیر در پژوهش های متعددی به موضوع سونار روزنه مصنوعی پرداخته شده است. در مواردی که نیاز به تصویربرداری از اهداف زیر آبی متحرک باشد، ایده سونار روزنه مصنوعی معکوس با الهام گرفتن از رادار روزنه مصنوعی معکوس قابل به کارگیری است اما باید شرایط و محدودیت های کانال زیر آب، مدنظر قرارگیرد. در سونار روزنه مصنوعی معکوس تک پایه و چالش های به کارگیری آن، سونار روزنه مصنوعی معکوس چندپایه ای پیشنهاد خواهد شد که با شرایط و هندسه خاص قرارگیری و با استفاده از منابع مجازی ایجاد شده به دلیل نحوه انتشار امواج در آب های کم عمق، تصاویر باکیفیت تری از اهداف متحرک زیر آب نسبت به حالت تک پایه ایجاد خواهد کرد. کیفیت بهتر تصاویر به دلیل دستیابی به چندگانگی مکانی ناشی از چندپایه کردن مجازی سونارهاست که با استفاده از خاصیت آب های کم عمق و چندمسیرگی موجود در آن و با استفاده از تنها یک فرستنده واقعی ایجاد گشته است.
تفاوت سونار با رادار:
رادارها امواج الکترومغناطیسی به کار می برند، و سونارها از امواج فراصوتی، که مانند امواج صوتی، ولی دارای بسامد بسیار بالا هستند استفاده می کنند. امواج فراصوتی هم مانند امواج صوتی و نور بازتابش می شوند. به کمک این امواج بازتابش شده ی نقشه ی سطح زیر دریاها و جای پستی و بلندی ها کاملاً مشخص می شود.
شرط عملکرد سیستم سونار :
نسبت سیگنال به پارازیت مشخص میکند که آیا سونار می تواند سیگنال هایی را در حضور پارازیت های زمینه در اقیانوس مشخص کند یا خیر.
برای این کار مواردی از جمله مرتبه منبع ، انتشار صدا ، جذب صدا ، اتلاف در انعکاس ، صداهای محدود و ویژگی های دریافت کننده در نظر گرفته می شود.
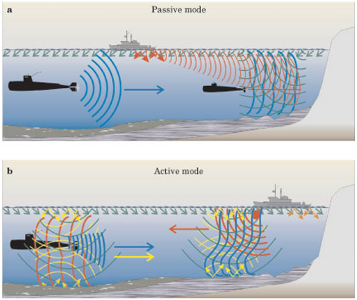
انواع سونار:
سونار دو نوع است :
۱) (سونار فعال)Active Sonar
۲) (سونار غیر فعال)Passive Sonar
سونار فعال ( محدوده پژواک ):
سیستم سونار فعال ، مثل ماهی یابها ، صداهای پژواک و سونارهای نظامی یک پالس صدا را می فرستند و منتظر پژواک آن می مانند . در سیستم سونار فعال منبع مانند یک دریافت کننده عمل میکند.
عملکرد سونار active فعال:
معادله باید موارد زیر را در نظر بگیرد:
بلندی شدت منبع صدا (مرتبه منبع)
انتشار صدا و میرایی هنگامی که پالس صدا از سونار به سوی هدف حرکت میکند(اتلاف حرکتی)
مقدار صدای منعکس و برگردانده شده به سمت سونار توسط هدف (توانایی هدف)
انتشار صدا و میرایی هنگامی که پالس منعکس شده به سوی دریافت کننده برمیگردد(اتلاف حرکتی)
پارازیتهای زمینه در دریافت کننده(مرتبه پارازیتها)
عبارتها در معادلات سونار بر حسب دسیبل هستند و با یکدیگر جمع میشوند تا معادلات سونار را بوجود آورند.
عملکرد سونار passive غیر فعال:
سونار غیر فعال با ایجاد پالس های صوتی (معروف به پینگ) ، وسپس گوش دادن به پالس بازگشتی عمل میکند . برای تشخیص فاصله از هدف ، شخص می تواند مدت زمان بین دریافت و ارسال پالس را اندازه گیری کند. برای اندازه گیری جهت و راستای هدف می توان از هیدروفونیک های متعدد استفاده کرده ، و سپس زمان دریافت پالس توسط هر یک از این هیدروفون ها را اندازه گرفت ، و با مقایسه این زمان ها به راحتی می توان جهت و راستای هدف را تعیین نمود .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
یک تشریح کامل از رادار های اهداف گسترده P18 (رادار های باند VHF)
نویسنده : افشین رشید
نکته : در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. با نماد P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف (رادار های اهداف بزرگترP18) جزو اهداف گسترده یا P هم گفته می شود.
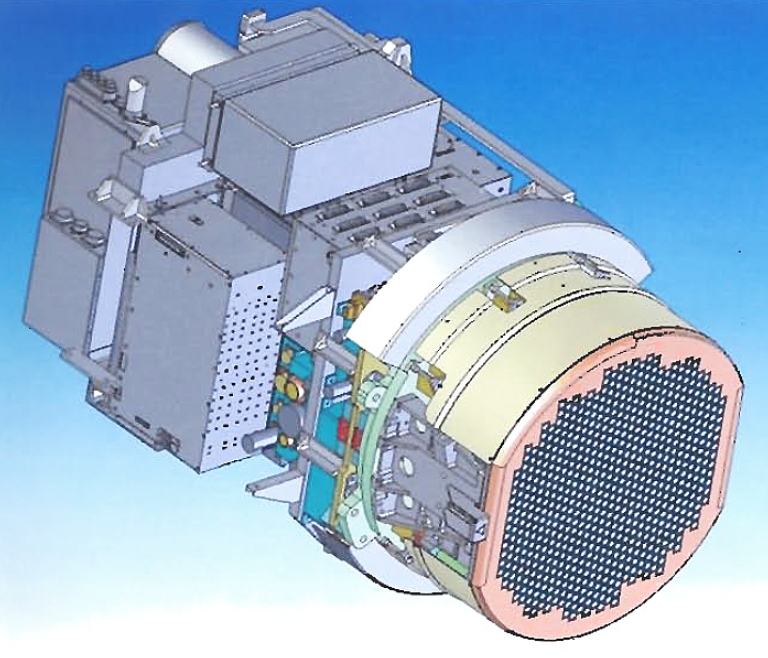
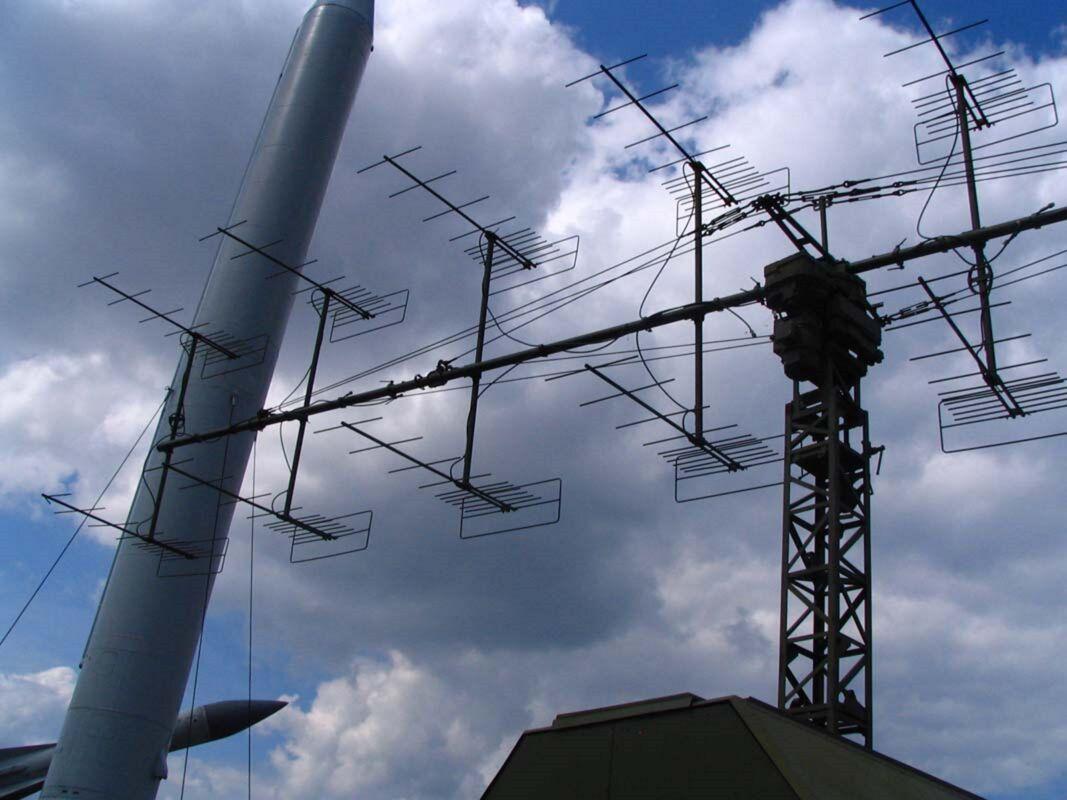
رادار های اهداف بزرگتر P18 یک رادار هشدار اولیه همه منظور است که در باند VHF کار می کند.این رادار توسعه بیشتر رادار P-12 است و از مفهوم آنتن، فرستنده و استفاده می کند. آنتن چهار آنتن یاگی برای الگوی آنتن باریکتر دریافت کرد. دوبلکسر تغییر کرد زیرا تقسیم توان بین دو صفحه آنتن مستقیماً در آنتن ایجاد می شود. مسیر دریافت یک پیش تقویت کننده نویز کم، در ابتدا یک لوله موج در حال حرکت دریافت کردو بعداً یک تقویت کننده حالت جامد. در مسیر گیرنده، برخی از بلوکها از P-12 منتقل شدند، اما سوئیچهای الکترونیکی داخلی علاوه بر ترانزیستورهای اثر میدان برای کنترل راه دور دریافت کردند. پردازش رادار پس از نشان دادن هدف متحرک (MTI)، تولید پالس همزمان و سیستم کوپلینگ ترانزیستوری شد.
نسخههای بعدی و به روز شده یک سیستم دیجیتال MTI دریافت کرد که در سطح بینالمللی نیز به عنوان یک کیت مقاومسازی ارائه شد. بلوک های تولید پالس ماشه، لوله های ذخیره پتانسیل و بلوک جبران با سیستم جدید جایگزین می شوند.نمایش داده های رادار در نسخه اصلی روی دو محدوده PPI انجام می شود که یکی از آنها تا فاصله 500 متری با تمام گزینه های کنترل از راه دور قابل تعویض است. برای آزمایشی، یک A-Scope نیز وجود دارد.کنترل چرخش آنتن یک سیستم سروو دنبال کننده با ورودی های کنترلی متعدد است. بنابراین، میتواند با ایستگاههای راداری دیگر کار کند، سپس میتواند ویدیوی P-18 را علاوه بر آن بر یا به جای خود نشان دهد. به همین منظور، ارزیابی پژواک های خارجی می تواند در P-18 یا از واحد نمایش از راه دور آن انجام شود.
موجودی یک رادار P-18 همیشه یک واحد رادار ثانویه است. بسته به محدوده، این یک NRS-12 کدگذاری ساده یا یک سیستم "Parol" پیچیده تر است. در حالی که NRS-12 هنوز می تواند در P-18 بارگیری شود، سیستم "Parol" به یک دستگاه همراه با یک تریلر نیاز دارد.P-18 را می توان خیلی سریع جابجا کرد. این بر روی دو کامیون تمام زمینی (اورال) نصب شده است که هر کدام دارای یک تریلر دو محوره هستند. این رادار بسیار در منطقه اروپای شرقی و جهان سوم برای ManPADها (Strela، Igla) استفاده می شود. همچنین برای استقرار موشک های بزرگتر (به عنوان مثال: همراه با ارتفاع یاب ) به عنوان رادار هدف برای مجموعه موشکی AA-SA-2 "Guideline" استفاده می شود.

نوسازی و به روز رسانی رادار p18
نوسازی و به روز رسانی رادار p18 پیشنهادی بر کاستی های ذکر شده در سیستم اصلی رادار p18 میباشد و به مشکلات تشخیص هدف رادار p18 غلبه می کند و پیشرفت های قابل توجهی را در عملکرد، قابلیت اطمینان و نگهداری ارائه می دهد.رادار P-18 یک رادار هشدار اولیه متحرک دو بعدی است که در باند VHF کار می کند. از مزیتهای اصلی رادار P-18 میتوان به برد طولانی و توانایی شناسایی حتی اهداف نامرئی که از فناوری رادارگریز استفاده میکنند اشاره کرد. اندازه آنتن VHF مانع از ادغام آن در موشک هایی می شود که برای از بین بردن رادارها استفاده می شوند و این امر مقاومت سیستم را در برابر حمله دشمن افزایش می دهد. علیرغم ساختار مکانیکی بسیار قابل اعتماد و نسبتاً ساده، سیستم های رادار اصلی به دلیل تجهیزات الکترونیکی قدیمی و منسوخ شده و نرم افزار نامناسب نمی توانند نیازهای امروزی را برآورده کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP
نویسنده : افشین رشید

اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. P نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
اهداف متحرک اهدافی هستند که نسبت به رادار دارای حرکت اند. اگر رادار بر روی زمین به طور ساکن باشد، اهداف طبیعی مانند جنگل یا زمین چمنزار حرکات نسبتا کندی را دارا هستند و پخش شدگی کمی در طیف فرکانسی سیگنال دریافتی ایجاد می کنند. باران و شکل های مشابه نیز دارای چنین حالتی هستند. قابل توجه بودن اثر سایر پدیده های آب و هوایی مانند طوفان، گردباد و غیره به فرکانس کاری رادار بستگی دارد. اهدافی مانند موشک، هواپیمای جت، ماهواره ها به میزانی سریع هستند که جابجایی طیفی قابل توجهی (ناشی از داپلر) در سیگنال دریافتی نسبت به سیگنال ارسالی ایجاد می کنند. در حالاتی که رادار متحرک است تمامی اهداف ساکن بر روی زمین متحرک در نظر گرفته می شوند. در ایجاد داپلر سرعت نسبی رادار و هدف نسبت به هم مطرح می باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
کاربرد (مخابرات _سونار) در اقیانوس و دریا
نویسنده : افشین رشید
نکته: یکی از اولین چیزهایی که اکثر مردم در مورد (الکترونیک _ امواج ارتباطی ) دریایی فکر میکنند، VHF است.
سیستم مخابراتی باند VHF و (SSBـHF / MF) همچنین باید اولین موردی باشد که درهنگام نصب یا ارتقای سامانه های مخابراتی الکترونیکی در هر کشتی، و سیستم مخابراتی ناوبری به کار گرفته شود . با این حال، برای بسیاری از دریانوردان، نیازهای مخابرات دریایی خود را فراتر از محدوده VHF گسترش میدهند. برای این افراد، باید یک باند متوسط / بسامد متوسط (SSBـHF / MF) مورد توجه قرار گیرد.رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپرکانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است .استفاده های معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی سیستم ناوبری استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.
رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده ازخاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپر کانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است.استفادههای معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی شما استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده از خاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.
اساساً 4 دسته ارتباطات دریایی وجود دارد:
شرایط اضطراری
شرایط فوری
شرایط ایمنی
شرایط عادی (معمولی)
در داخل این دسته ها از 3 سیگنال اضطراری شناخته شده بین المللی برای ارتباطات صوتی استفاده میشود:
MAYDAY با تلفظ DAYـMAY :این سیگنال شرایط اضطراری است و تنها نشان میدهد که کشتی در شرایط خطرناک قرار گرفته و نیاز به کمک فوری دارد.
PANـPAN :این سیگنال شرایط فوری است و زمانی استفاده میشود که ایمنی کشتی یا فرد در معرض خطر باشد.
SECURITE با تلفظ ”TAY – A – CURE – SAY :”این سیگنال شرایط ایمنی است و برای مشاوره دادن به دیگران در مورد ناوبری مهم یا هشدارهای آب و هوایی که ممکن است ایمنی دیگر کشتیها را تحت تأثیر قرار دهد مورد استفاده قرار میگیرد. وضعیت اضطراری در داخل سه دسته تقسیم شده است، به این معنی که هرکدام از این تماس ها باید در کانال 16 ایجاد شود، زیرا بسیاری دیگر ایستگاه های ساحلی در بسامد 7.24 به گوش هستند.
اولویت این سیگنال ها به ترتیب زیر میباشد:
ایمنی (SECURITE )بالاتر از هر ارتباطی عادی (معمولی) است.
ارتباطات فوری (PANـPAN )مقدمه ای بر ارتباطات ایمنی میشود.
ارتباط اضطراری (MAYDAY )بالاتر از همه دسته های دیگر ارتباطات است. دسته ارتباطات دریایی وجود دارد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات ) رادارهای LPI (سیگنال LPI ومشخصات مدولاسیون LPI)
نویسنده: افشین رشید

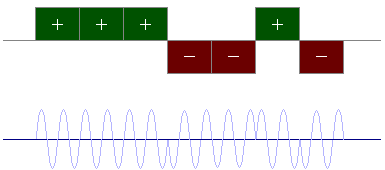
نکته: یکی از موضوعات مهمی که در رادارهای LPI اهمیت ویـژه ای پـیـدا میکند تکنیک فشرده سازی پالس میباشد. در یک تقسیم بندی کلی روشهای فشرده سازی پالس به دو دسته کلی فشرده سازی پالس بـامدولاسیون فرکانس و یا فاز تقسیم میشونـد. در این تحلیل عمل تشخیص حضور یک سیگنال LPI ومشخصات مدولاسیون LPI در مقادیر مختلف سیگنال بـه نـویـز را به دست میآید.
نتایج شبیه سازیهای صورت گرفته برای انواع سیگنالهایِ LPI راداری آمده است. طبق این نتایج، توزیع وینر-ویل برای آشکارسازی سیگنال و تشخیـص پـارامـتـرهـای آن در مـورد سیگنالهای FMCW ،کدهای چندفازه و چندزمانه مناسب میباشـد. این توزیع برای کدهای کاستاس،FSK و PSK/FSK به خوبی عـمـل نمیکند. اما برای سیگنال PSK/FSK و FSK تکنیک CWD نـتـایـج بسیارخوبی ارائه میکند.روش مـدولاسـیـون فرکانس به دو دسته مدولاسیون خطی و غیر خطی فرکانس و روش مدولاسیون فازی نیز به دو روش باینری و چند فازی انجام میگیـرد و به سیگنالهای کد شده فاز معرفی میشوند.
تنوع کدهای چند فازی در رادارهای LPI
کدهای چند فازی دنباله هایی طول محدود، با دامنه ثـابـت و فـاز متغییر ϕk هستند که در آنها بر خلاف کدهای باینری مقادیـر ϕk میتواند هر مقداری بین 0 و 2π داشته باشد. افزایش تعداد عناصر یا مقادیر فاز در دنباله، امکان تولید دنباله هایی با طول بلندتر و سـطـح لوب فرعی پایین را میدهد که منجر به بهره پردازشی بـیـشـتـر در گیرنده میشود. از معروفترین کدهای چند فازی که در کاربردهـای راداری مورد استفاده قرارمیگیرند کدهای چندفازی بارکر، کـدهـای فرانک، P1 ،P2 ،P3 و P4 میباشد که در ادامه بررسی میشونـد. لازم به ذکر است که تنوع کدهای چند فازی که در رادار استفاده میشوند بسیار زیاد هستند و در بخش رادار LPI فقط دو دسته از این کدهـا (فرانک و بارکر) استفاده میگردد.
(کد های فرانک ) شناسایی سیگنالهای کـد شده فازی در رادارهای LPI
این کد با مدولاسیون خطی فرکانس و کدهای بارکر ارتباط نزدیکـی دارد که به دلیل دستیابی به سطح لوبهای فرعی پایین در رادارهـا مورد استفاده قرار گرفته اند. اینکد از تقریب پله ای سـیـگـنـال بـا مدولاسیون فرکانس خطی با M پله فرکانسی و M نـمـونـه در هـر فرکانس حاصل میشود. پس شکل موج فرانک شامل یک سیگنال بـا دامنه ثابت میباشد که مدولاسیون فاز آن به وسیله فازهایی مطـابـق با سیستم رادار انجام میشود.
(کدهای بارکر) کاربرد تبدیلات زمان-فرکانس در پردازش سیگنال راداری LPI
ایده اساسی رادارهای LPI استفاده از پخش کردن توان تشعشع یافته در حوزه زمان و حوزه فرکانس (سیگنال های طیف گسـتـرده)، به منظور تولید چگالی طیف توان زیر سطح نویزِ ورودیِ گیرندة شنود میباشد. بنابراین برای اینکه گیرندة شنود بتواند این سیگنـالهـا را آشکارسازی کند به گین پردازشی بالایی نیاز دارد که معـمـولاً ایـن گین پردازشی در قسمت پردازش سیگنال گیرنده دیجیتال بـهدسـت میآید. احتمال پایین شنود سیگنالهای رادار LPI قابلیت آشکـارسـازی گیرنده های شنود امروزی را با مشکل مواجه کـرده اسـت. مـیـزان موفقیت یک رادار LPI ،به میزان سخت بودن آشکارسازی سیـگـنـال آن برای گیرندههای شنود، وابسته میباشد. نشان داده شده کـه بـا پردازشهای خاص در قسمت پردازش سیگنال گیرنده دیـجـیـتـال میتوان میزان LPI بودن رادار را کاهش داد یا آن را از LPI بـودنخارج کرد.برای استخراج اطلاعات سیگنال، تبدیل فوریه به عنوان ابزار اصلی پردازش سیگنالها در شاخه های مختلف مورد استفاده قرار میگیـرد ولی این تبدیل ضعف های کلیدی دارد که مرتبط به پایه های مختلـط آن میباشد. یکی از ضعف های تبدیل فوریه این است که برای تحلیل سیگنالهای غیر ایستان و سیگنالهای دارای تغیرات ناگهانی مناسب نمیباشد. تبدیل فوریه برای یک سیگنال نشان میدهد که سیگـنـال مورد نظر دارای چه فرکانسهایی میباشد ولی نمیتواند زمان وقـوع هر فرکانس را نمایش دهد. بنابراین ضعف اساسی تبدیل فرکانس راداری LPI ایـن است که در تبدیل به حوزة فرکانس اطلاعات زمانی از بیـن مـیرود. برای غلبه بر این مشکل باید در این تبدیل اصلاحاتی صورت گیرد تا بتواند در تحلیل سیگنالهای غیر ایستان مفید باشد. برای این منظور برخی تبدیلات خطی و غیر خطی معرفی شدند کـه در تـبـدیـلات QMFB به طور خطی نظیر تبدیل فوریه زمان کوتاه، تبدیل ویولت و همزمان نمیتوان تفکیک پذیری فرکانسی و زمانی خوبـی داشـت و برای رسیدن به یک تفکیک پذیری فرکانسی خوب، حجم محاسبـات بالایی نیاز است. برای رفع این مشکلات تبـدیـلهـای غـیـرخـطـی معرفی شدند. توزیع وینر-ویل بهعنوان یکی از چند تکنیک تحـلـیـل زمان فرکانسی غیرخطی در پردازش سیـگـنـال ذکـر شـده اسـت.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار PRF (فرکانس تکرار پالس)
نویسنده: افشین رشید
رادار ها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند .
_ موج رادار پالسی رادار موج پیوسته(سینوسی)
مکانیسم عمل همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند. به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که آیا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند ؛ حتی سرعت جسم نیز بخوبی قابل محاسبه است.کاربرد ها نظارت و رهگیری هواپیماها و موشکها نظارت و رهگیری اهداف دریایی یا زمینی نظارت و رهگیری اجرام فضایی هواشناسی اندازه گیری سرعت وسایل نقلیه رادار؛ برای تصویر دو-بعدی و سه-بعدی پیداکردن مین در زمین فرود(برای نمونه برای هواپیما) دقیق عکسبرادری از کرههای دیگر با رادار تصویری پرهیز تصادم پیدا کردن آب در مناطق شنزار و خشک نظارت بر اهداف جنبنده در زمین نظارت بر اهداف جنبنده در مناطق پردرخت و جنگل های انبوه از موارد کاربرد رادار میباشد.
رادارهای پالسی (Pulse Transmission)
در این رادارها موج ارسالی به صورت یک پالس با فرکانس مشخص به نام PRF(فرکانس تکرار پالس) می باشد. نسبت دوره تناوبPRT زمان تکرار پالس به عرض پالس را نسبت به زمان کار می گویند. رادارهای پالسی با توجه به دوره تناوب و نسبت زمان کار دارای تنوع بوده که به مواردی از آنها اشاره می شود :
۱- رادارهای پالسی معمولی . در این رادارها معمولا عرض پالس در حدود چند میکروثانیه است و نسبت زمان کار بین حدود ۰٫۰۱ تا ۰٫۰۰۱ تغییر می کند. از این رادارها جهت هواشناسی و دیده بانی و مراقبت هوایی استفاده می شود.
۲- رادارهای پالسی با قدرت تفکیک بالا (High Resolution). در این رادارها عرض پالسی بسیار کوچک انتخاب می شود و چون میزان دقت در تشخیص فاصله توسط عرض پالسی مشخص می گردد دارای دقت بالایی در تشخیص فاصله هدف می باشد. (هر قدر عرض پالس کوچکتر باشد محاسبه فاصله دقیقتر است.) این رادارها برای آشکار سازی اهداف ساکن در حضور کلاتر (سیگنالهای برگشتی ناخواسته به صفحه رادار) و نیز تشخیص یک هدف در میان چند هدف نزدیک به هم قابل استفاده می باشد.
۳- رادار پالس فشرده(Pulse Compression) . این رادار از پالس های با عرض زیاد استفاده می نماید و برای افزایش دقت از مدولاسیون فاز یا فرکانس در هر پالس استفاده می کند. در نتیجه ضمن افزایش پهنای باند تشخیص دقیق فاصله اهداف نیز حاصل می شود و نسبت به رادار نوع قبلی دارای این مزیت است که توان پیک (حداکثر توان) فرستنده را در حد معتدلی نگاه می دارد .
رادار موج پیوسته (CW)
این رادار دارای نسبت زمان کار واحد می باشد،یعنی موج ارسالی به صورت پیوسته است . این نوع رادار نیز دارای انواع مختلف به ترتیب زیر است :
۱- رادار موج پیوسته معمولی : در این نوع رادار می توان سرعت و جهت حرکت هدف را در راستای خط واصل رادار تشخیص داد و امکان تشخیص فاصله به دلیل عدم استفاده از هرگونه مدولاسیون وجود ندارد و معمولا در ناوبری هوایی کاربرد دارند .
۲- رادار موج پیوسته مدوله شده فرکانس : در این رادار از مدولاسیون فرکانس برای افزایش پهنای باند و ایجاد امکان تشخیص فاصله استفاده می شود. از مهم ترین کاربردهای این نوع رادار ارتفاع سنجهای هواپیما می باشد.
۳- رادار موج پیوسته چند فرکانسه : در این نوع رادار با توجه به اختلاف فاز موج دریافتی از یک هدف در فرکانسهای مختلف می توان فاصله هدف را تشخیص داد.
رادار روزنه مصنوعی (Synthetic Aperture Radar)
در این رادار معمولا بیم آنتن در جهت عمود بر مسیر حرکت تنظیم می شود و دارای دقت بالایی در زاویه است .
عملکرد آنها مانند یک آنتن ساکن با تعداد زیادی آرایه می باشد. خروجی این نوع رادار یک تصویر با دقت بالا از صحنه ی مورد نظر می باشد. رادار های فوق به دلیل ایجاد تصاویر دقیق کاربرد های فراوانی در علم زمین شناسی و جغرافی و همچنین در امور نظامی پیدا کردند. این رادار حتی قادر به ایجاد تصاویر سه بعدی از اشیا و اهداف می باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
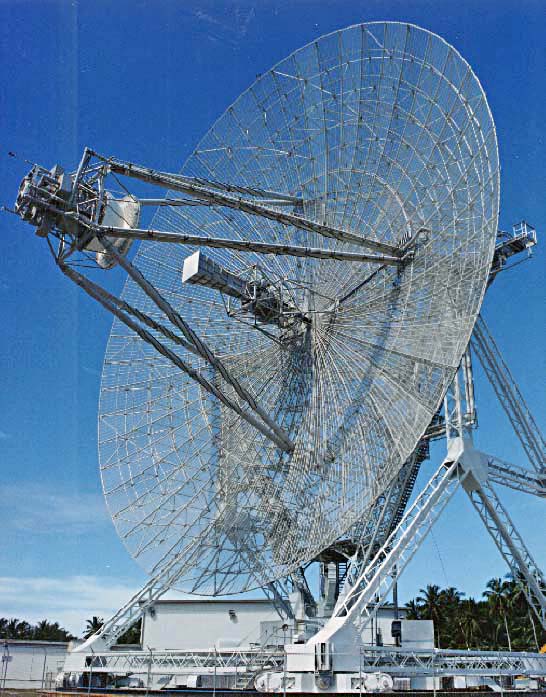
مزیت اصلی آنتن های رفلکتوری پارابولیک در رادار Radar
نویسنده : افشین رشید
مزیت اصلی آنتن های رفلکتوری پارابولیک در رادار داشتن دایرکتیویته و در نتیجه گین بالاست که استفاده آنها را در رنج وسیعی از باند مایکروویو جهت انتقال دیجیتال و آنالوگ اطلاعات، ضروری نموده است. این کاربردها شامل انتقال رادیویی نقطه به نقطه (Line of Site)، ایستگاه های زمینی راداری، کاربرد های ردیابی، رادار کشف ریز پرنده (پهباد) ، اهداف نظامی و ... می باشد.هر دو گونه آنتن سَهموی (Parabolic Antenna) یعنی دو رفلکتوری و تک رفلکتومی بسته به چگونگی سیستم تغذیه (Feeding) به دو نوع تغذیه متقارن یا هم محور (front-fed) و نامتقارن تقسیم می شوند.هر کدام از آنتن های فوق دارای مزایا و معایب ویژه ای است که ضرورت استفاده آنها را در کاربرد خاصی معینی می نماید. آنتن های غیر هم محور اثر سد دهانه (aperture blocking) را کاهش داده ولی در عوض دریافت پلاریزاسیون ناخواسته (XPOL) را افزایش می دهد.
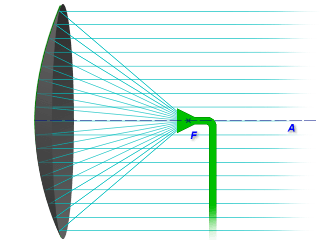
آنتن سَهموی (Parabolic Antenna) نوعی از آنتن های گیرنده است که با استفاده از یک سطح بازتابنده یا پارابولیک برای هدایت امواج رادیویی و فرکانسهای مخابراتی استفاده میشود.قدرت آنتن پارابولیک در رادار ها برای اکتشاف ریز پرنده ها مانند پهباد بسیار بالا است.این نوع از آنتن گیرنده در مخابرات یکی از بهترین انخابها برای مناطقی است که نویز بالا دارند و سطح سیگنال دریافتی بسیار پایین است .آنتن سَهموی (Parabolic Antenna) در اصل کار عدسی را در رادار انجام میدهند ، هر آنتن پارابولیک یک واحد دریافت کننده در فاصله کانونی خود قرار دارد ، سیگنال دریافتی توسط گرید یا صفحه آنتن به واحد دریافت کننده میفرستد . اما دلیل اینکه دارای بشقاب توری مانند هستند ، برای عبور جریان هوا است تا لرزش آنتن کم بشود ،هم به صورت عمودی و هم افقی مورد استفاده قرار میگیرند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
کاربردهای نانو پوشش ها جذبی در صنایع چند گانه نظامی( پوشش غیر رهگیری)
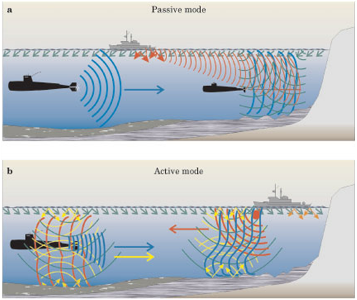
نانو پوشش های هوشمند، ضرورت بهره گیری از فناوری نانو در ساخت و تولید پوشش های ضد امواج و رادار گریز هوشمند آشکارتر گردیده است.یکی از راه های نامرئی کردن تجهیزات نظامی مانند هواپیماها، کشتی ها و زیردریایی ها از دید رادارها، استفاده از پوشش های هوشمند است. اساس کار رادارها بر تولید و انتشار امواج الکترومغناطیسی با یک فرستنده و دریافت پژواک احتمالی از طریق گیرنده است. در صورت وجود پژواک، صفحه نمایش رادار آن را به صورت یک نقطه نورانی نشان می دهد، همچنین رادارها با محاسبه مدت رفت و برگشت امواج قادر به تشخیص فاصله و سرعت هدف هستند. فلزات، امواج رادار را به خوبی منعکس می کنند؛ لذا بدنه فلزی یک هواپیما جسمی ایده آل برای انعکاس سیگنال های منتشر شده از سوی یک رادار است. برای نامرئی کردن اهداف نظامی مانند هواپیماها و کشتی ها نیز به کار می رود:
تغییر شکل بدنه اهداف نظامی: با تغییر شکل بدنه اهداف نظامی می توان انعکاس امواج انتشار یافته از رادار را به سمتی غیر از تجهیزات رادار هدایت کرد. بیشتر از هواپیماهای موجود شکلی منحنی دارند.
این نوع طراحی در ضمن اینکه آنها را آیرودینامیک می کند، سبب می شود امواج رادار با برخورد به هر جای هواپیما، به طرف تجهیزات رادار منعکس گردد، در حالی که با تغییر شکل سازه از حالت منحنی به سطوح با لبه های تیز می توان موجب پخش امواج رادار در جهاتی غیر از جهات قابل تشخیص توسط رادار شد.
_lz39.jpeg)
کاربردهای نانو پوشش ها جذبی در صنایع چند گانه نظامی( پوشش غیر رهگیری)
نانو پوشش های هوشمند با بهره گیری از نانوذرات فعال و گروه های عاملی مناسب در ساختار مَحمل قادرند تا در مقابل محرک های محیطی عکس العمل های هوشمندانه محافظتی، ترمیمی، جذبی، دفعی و یا خنثی کننده نشان دهند. از کاربردی ترین نانوپوشش های هوشمند در صنایع نظامی، هوافضا دریایی می توان به پوشش های هوشمند ضد رادار اشاره کرد که قادر به تشخیص زودهنگام و جلوگیری از شناسایی تجهیزات فلزی هستند. همچنین از نانو پوشش های زیست فعال نظیر پوشش های ضدباکتری و ضدخزه، برای جلوگیری از تخریب ناشی از تجمع میکروارگانیسم ها بر روی سازه های فلزی و پیشگیری از افزایش وزن تجهیزات دریایی استفاده می شود. مانند زیر دریایی ها و ناوچه های نظامی و تجهیزاتی و رادارهایی که در عمق دریا مورد استفاده قرار میگیرند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
سیستمهای ESM (Electronic Support Measures) امواج ضد راداری (علوم رادار و مخابرات)
نویسنده : افشین رشید
.
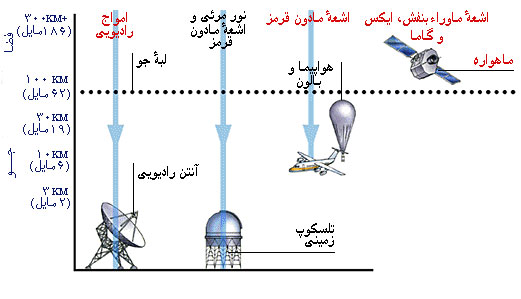
.
هدف اصلی این رده از سیستم ها فراهم آوردن امکان جلوگیری تاکتیکی از تحرک دشمن یا ادوات دشمن می باشد(Tactical Interception). ساده ترین و پرکاربردترین نمونه از این سیستم ها، سیستم های RWR (Radar Warning Receiver) هستند که با سیگنال های دریافتی از سوی یک هدف از پیش شناخته شده با نمونه های ذخیره شده از آن هدف را تشخیص می دهند. ترکیب سیستم های مختلف و انواع سنسور ها و تحلیل گرهای متفاوت باعث شده است تا امروزه با داشتن اطلاعات مناسبی از تشعشع کننده ها کمک شایانی جهت حمله به مواضع دشمن از طریق شناسایی و تشخیص مواضع دشمن باشند.
حسن RWR ها سادگی آنها می باشد زیرا مبنای نتیجه گیری اطلاعات تعداد نسبتاً کمی از پارامترها با دقت متوسط می باشد. قابلیت اطمینان بالا، وزن کم و هزینه نسبتاً پایین، از سایر مزایای چنین سیستم هایی می باشد.
غالبا ً RWR ها برای تشخیص یک تهدید قریب الوقوع و خطر حتمی بکار می روند. به عنوان مثال تشخیص یک رادار دشمن که بر روی سایت حفاظت شده قفل شده است. استفاده از RWR ها در هواپیماها و کشتی ها مرسوم است و خلبان یا کاپیتان کشتی را قادر می سازد تا در زمان مناسب عکس العمل مناسبی از خود نشان دهد. این عکس العمل می تواند یک مانور گریز باشد و یا ترکیبی از مانور و شلیک همزمان chaffو روش های jamming. در بخش ECM در خصوص روش chaff و تکنیک های مربوطه توضیح داده خواهد شد. در اینجا تنها به این نکته اشاره می شود که یک راه شلیک یک کارتریج اتفجاری شامل میلیون ها دیپل بسیار کوچک و سبک می باشد که یک اکو (echo) راداری بسیار قوی جهت مخفی کردن سایت مورد حفاظت ایجاد می نماید. سیگنال های الکترومغناطیس دریافت شده توسط آنتن ها ی یک سیستم ESM عموماً ترکیبی از پالس های بسیار فشرده پهن باند و امواج پیوسته می باشد. اطلاعاتی که در اختیار مرکز تحلیل و پردازش قرار می گیرد تا موقعیت اطراف را شبیه سازی کند غالباً در قالب فرکانس حامل (Carrier Frequency)، DOA(Direction Of Arrival) و TOA (Time Of Arrival) عرض پالس (PW) دامنه و مدولاسیون روی پالس ها و امواج پیوسته می باشد. پردازنده مرکزی سیستم ESM با دریافت چنین اطلاعاتی در طول زمان اطلاعات موقعیتی و وضعیتی تشعشع کننده های تولید کننده این اثرات را استخراج می کند. علی رغم تلاش ها و مطالعات فراوانی که در این زمینه صورت گرفته است همچنان تشخیص و استخراج اتوماتیک اطلاعات موقعیتی و وضعیتی یکی از مشکلات جنگ الکترونیک محسوب می شود.
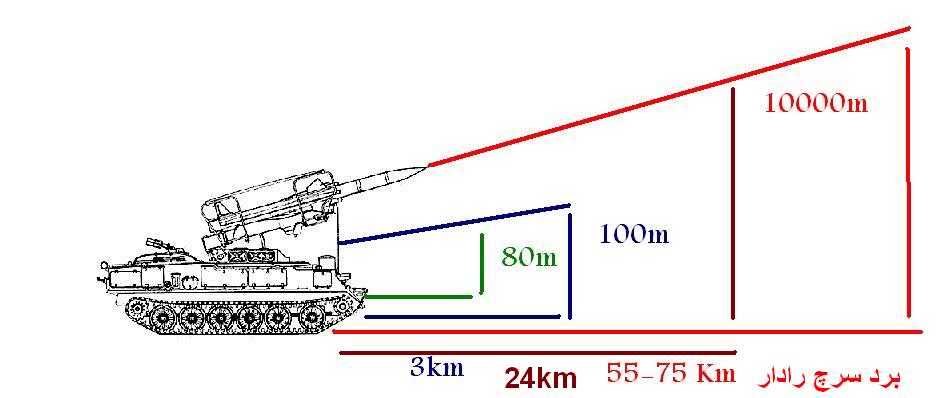
هدف این گونه سیستم ها جلوگیری از تبادل اطلاعات دشمن است. این کار از طریق تشخیص محل استقرار فرستنده ها و سیستم های رله رادیویی و دکدینگ پیغام ها و علائم رد و بدل شده به صورت همزمان صورت می گیرد. آگاهی از مقاصد دشمن را می توان مهمترین اطلاعات جهت عکس العمل های مناسب و مقابله متناسب دانست.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات ) سیمپلکس و داپلکس در سیستم های مخابراتی
نویسنده: افشین رشید

نکته : هدف کلی سیستم های مخابراتی - مانند سیستمهای قدرت - انتقال انرژی، از نقطه ای به نقطه دیگر است و با این تفاوت که در سیستمهای قدرت، مقدار انرژی دریافتی در طرف مصرف کننده بسیار زیاد (توان های در حد کیلو وات تا گیگا وات)، و فرکانس سیگنال پائین (معمولاً تا 400 هرتز) و انتقال انرژی توسط سیم انجام می شود.
در سیستم های مخابراتی، انرژی دریافتی در طرف گیرنده بسیار کم (توانهای در حد پیکو وات تا میلی وات) و فرکانس سیگنال بالاست (فرکانس به بیش از چند صد ترا هرتز نیز میرسد). انرژی در (فیبر نوری) مخابرات توسط سیم و موج بر (بدون واسطه، حتی در خلأ) منتقل یا بصورت امواج رادیویی توزیع می شود.
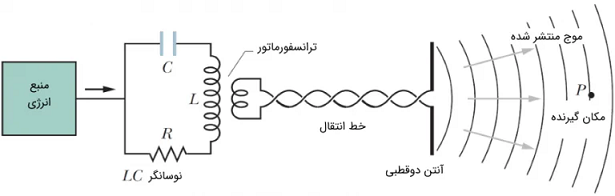
یک سیستم مخابراتی معمولاً از سه جزء اصلی تشکیل مـی شـود: (فرسـتنده _ کانال _ گیرنده) ؛ برای مثال در ساده ترین حالت، فرستنده می تواند یک میکروفن؛ کانال، دو رشته سیم و گیرنده یک گوشی باشد. یا یک ایستگاه رادیویی بعنوان فرستنده، یک دستگاه رادیو (یا تلویزیون) بعنوان گیرنده و فضای بین این دو به عنوان کانال ارتباطی محسوب می شود. در این موارد که مسیر انتقال اطلاعات از یک نقطه به نقطه دیگر و به عبارت دیگر جهت انتقال اطلاعات ثابت است، سیستم مخابراتی جهت انتقال اطلاعات یک سیستم یک جهته یا سیمپلکس در کانال دو طرفه باشد، یعنی مسیر سیگنال هم از نقطه A به سمت نقطه B باشد و هم از نقطه B به سمت A گویند. اگر مانند تلفن، انتقال اطلاعات همزمان، در هر دو طرف باشد، سیستم تمام 2 نقطه A ؛ به آن دوپلکس و در صورتی که مانند بی سیم های دستی در هر زمان اطلاعات فقط در یک جهت گفته میشود. ارسال شوند به آن سیستم نیمه دوپلکس میباشد. اگر ابعاد عناصر به کار رفته و سیم های رابط در مداری قابل مقایسه با طول موج سیگنال باشند. انرژی از مدار - بصورت انرژی (امواج ثابت) تشعشعی (امواج الکترومغناطیس) - منتشر میشود . میزان انرژی تشعشعی هنگامی ماکزیمم است که طول سیم های رابط مضرب فردی ازطول موج باشند، در این رابطه: f ، فرکانس؛ λ ، طول موج؛ V ،سرعت انتشار موج در ماده؛ C ،سرعتε ، ضریب دی الکتریک ماده است.
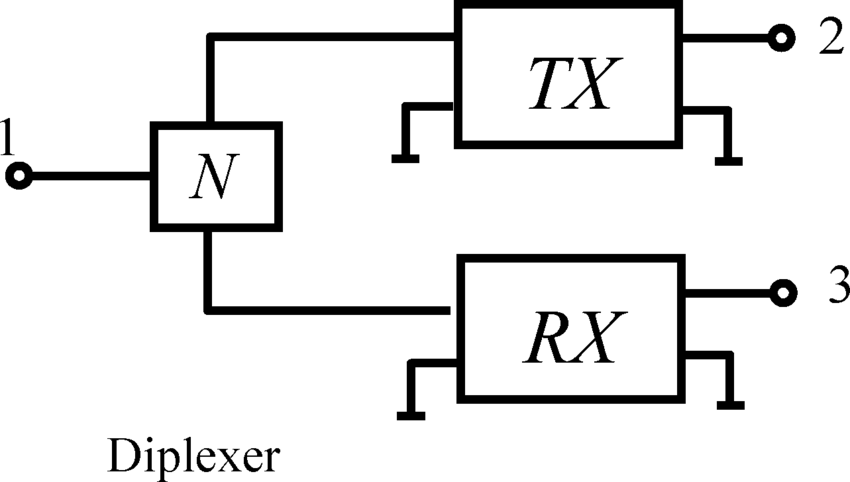
چون در اکثر مواقع ابعاد عناصر به کار رفته و طول سیمهای رابط، خیلی کوچکتر از طول موج سیگنال می باشد، یک قطعه سیم را بعنوان آنتن در خروجی مدار قرار میدهند، بطوری که طول این سیم حدوداً λ باشد. بنابراین آنتن بعنوان یک مبدل انرژی الکتریکی به انرژی الکترومغناطیسی( در مقابل و بلعکس ) محسوب میشود. بنابراین فرستنده میتواند یک نوسان ساز، بعبارت دیگر یک مولد سیگنال به اضافه یک قطعه سیم به طول 4 باشد. هنگامی که یک سیم به طول مضارب فردی از λ در میدان الکترومغناطیسی قرار گیرد، λ جریانی با همان فرکانس از سیم می گذرد، که میتوان با به کار گیری یک مدار تشدید، ولتاژی تولید نمود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار هواشناسی یا Meteorological radar از دو قطبی شدن نبض رادار (گیرنده _ فرستنده) استفاده میکند. (علوم مخابرات) و (علوم رادار)
نویسنده: افشین رشید
نکته : سیستم های راداری داپلر با طراحی خود می توانند اطلاعاتی راجع به حرکت اهداف و همچنین موقعیت آنها ارائه دهند. وقتی پالس امواج رادیویی را منتقل می کند ، سیستم فاز (شکل ، موقعیت و فرم) آن پالس ها را ردیابی می کند . رادار های هواشناسی توانایی شناسایی حرکت قطره های باران و شدت بارش را دارند. هر دو نوع این اطلاعات می تواند برای تعیین ساختار طوفان و پتانسیل آن برای ایجاد هوای بد تحلیل شود.
با اندازه گیری شیفت (یا تغییر) فاز بین یک پالس منتقل شده و یک پژواک دریافتی ، حرکت هدف مستقیماً به سمت یا دور شدن از رادار محاسبه می شود. سپس این یک سرعت را در امتداد جهتی که رادار نشان می دهد ، فراهم می کند که سرعت شعاعی نامیده می شود. تغییر فاز مثبت به معنای حرکت به سمت رادار و تغییر منفی نشان دهنده حرکت به دور از رادار است.علاوه بر این ، رادار هواشناسی یا Meteorological radar از دو قطبی شدن نبض رادار (گیرنده _ فرستنده) استفاده میکند.رادار هواشناسی یا Meteorological radar به پیش بینی کنندگان شرایط آب و هوایی کمک می کند تا باران ، تگرگ ، برف ، خط باران / برف و گلوله های یخی را برای پیش بینی انواع آب و هوا شناسایی کنند.یکی دیگر از مزایای مهم رادار هواشناسی یا Meteorological radar با وضوح بیشتری بقایای گردباد موجود در هوا (توپ آوار) را تشخیص می دهد - به پیش بینی کنندگان اجازه می دهد تا تأیید کنند که گردباد روی زمین است و باعث آسیب می شود تا بتوانند با اطمینان بیشتری به جوامع موجود در این مسیر هشدار دهند. این امر مخصوصاً در شب هنگامی که لکه های زمینی قادر به دیدن گردباد نیستند بسیار مفید است.
اصول رادارها این است که پرتویی از انرژی به نام امواج رادیویی از آنتن ساطع می شود. هنگامی که آنها به اشیا objects موجود در جو برخورد می کنند ، انرژی در همه جهات پراکنده می شود و مقداری از انرژی مستقیماً به سمت رادار منعکس می شود.هرچه جسم بزرگتر باشد ، میزان انرژی برگشتی به رادار نیز بیشتر خواهد بود. این توانایی را برای ما فراهم می کند تا قطرات باران را در جو مشاهده کنیم. علاوه بر این ، مدت زمانی که پرتوی انرژی برای انتقال و بازگشت به رادار نیز نیاز دارد ، با فاصله تا آن جسم است.اثر تغییر فاز مشابه "تغییر داپلر" است که با امواج صوتی مشاهده می شود. با "تغییر داپلر" ، به دلیل فشرده سازی (تغییر فاز) امواج صوتی ، صدای صوتی جسمی که به سمت مکان شما حرکت می کند بیشتر است . هنگامی که یک شی از مکان شما دور می شود ، امواج صوتی کشیده می شوند و در نتیجه فرکانس کمتری ایجاد می کنند.احتمالاً این اثر را از وسیله نقلیه یا قطار اضطراری شنیده اید. هنگامی که وسیله نقلیه یا قطار از مکان شما عبور می کند ، آژیر یا سوت هنگام عبور جسم پایین می آید.پالس های رادار داپلر به طور متوسط حدود 450000 وات قدرت انتقال دارند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادارهای پالسی Pulsed (تپی)مانع از تداخل بین گیرندگی و فرستندگی
نویسنده: افشین رشید

نکته: دسته بندی انواع رادارها را میتوان بر اساس به سختافزار، نرمافزار، تکنیکهای پردازش سیگنال، نوع کارکرد، فرکانس کاری و... انجام داد.
رادارهای پالسی Pulsed (تپی)
رادار پالسی راداری است که ابتدا یک پالس ارسال میکند و سپس منتظر رسیدن اکو اهداف میماند. این امر مانع از تداخل بین گیرندگی و فرستندگی میشود و امکان استفاده از یک آنتن واحد به عنوان گیرنده و فرستنده را فراهم میآورد. با اندازهگیری زمان بین ارسال و دریافت میتوان برد هدف را بدست آورد (در رادارهای مونواستاتیک)
اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. پالسی نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
رادار پالسی Pulsed Radar به روشی بسیار ساده کار می کند. امواج الکترومغناطیسی ، مانند امواج رادیویی یا مایکروویو ، توسط یک فرستنده با سرعت نور (2.93 X 10 8 m / s) ارسال می شوند ، از اشیا پرش می کنند و به گیرنده منعکس می شوند. امواج الکترومغناطیسی برخلاف امواج صوتی می توانند انرژی را از طریق خلا منتقل کنند. به همین دلیل از امواج الکترومغناطیسی برای ارتباط با ماهواره ها در فضای عمیق استفاده می شود.یک سیستم راداری اساسی از یک فرستنده ، سوئیچ ، آنتن ، گیرنده و یک صفحه نمایش خروجی تشکیل شده است. همه چیز با فرستنده شروع می شود زیرا یک پالس انرژی بالا را از طریق آنتن ارسال می کند. پس از انتقال کامل سوئیچ کنترل به گیرنده و آنتن آماده دریافت می شود. پس از دریافت سیگنال ، کنترل دوباره به فرستنده باز می گردد. سوئیچینگ بین فرستنده و گیرنده تا 1000 برابر در ثانیه اتفاق می افتد.اطلاعات مفید را می توان از داده های به دست آمده از سیگنال برگشتی محاسبه کرد. سیگنال برای قدرت ، زمان صرف شده برای بازگشت و فرکانس آن تجزیه و تحلیل می شود. از این اطلاعات می توانیم سرعت ، فاصله ، جهت هدف را تعیین کرده و حتی یک تصویر ایجاد کنیم.اگر چه سرعت سیگنال منعکس نشده تغییر می کند ، اما فرکانس بسته به سرعت هدف تغییر می کند. این به عنوان اثر داپلر شناخته می شود. هر چه هدف با سرعت بیشتری حرکت کند ، فرکانس سیگنال برگشتی نیز بالاتر می رود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات) محاسبه مدت زمان یک پالس از لبه بالا رونده تا لبه ی بالا رونده پالس قبلی در رادار Radar
نویسنده : افشین رشید
نکته : رادار سیستمی است که بر اساس خاصیت امواج الکترومغناطیسی عمل می نماید و با ارسال امواج و دریافت سیگنال منعکس شده از هدف ، مشخصات و مختصات هدف را ارائه می دهد.
محاسبه PRT: مدت زمان یک پالس از لبه بالا رونده تا لبه ی بالا رونده پالس بعدی در رادار میباشد.
محاسبه PRF : محاسبه مدت زمان یک پالس از لبه بالا رونده تا لبه ی بالا رونده پالس قبلی در رادار (بیشتر بازگشت به عملکرد قبلی برای شناسایی دقیق تر) میباشد.
عملکرد مدولاتور : مدولاتور تولید پالس 8µ sec می کند زیرا 1µ sec برای گرم شدن لامپ قبل از تولید سیگنال می باشد و 1µ sec جهت خروج کامل سیگنال از لامپ مگنترون می باشد.
Coho : تولید کننده سیگنال مرجع می باشد حدوداً30 MHZ
Stalo: تولید کننده سیگنال کریر می باشد حدود 1250 MHZ - 1350 MHZ
P.W: فاصله بین لبه ی بالا رودنده تا لبه پایین رونده ی پالس در رادار میباشد .
تقسیم بندی رادارها از نظر کاربرد:
رادار تجسسی
رادار اخطار اولیه
رادارهای ارتفاع یاب
رادارهای ردیاب
رادار کنترل آتش
رادارهای نجومی(فضایی)
رادارهای کنترل ترافیک
_2ius.gif)
باندهای فرکانسی برحسب استفاده در انواع رادارها(radar's frequency)
باند های فرکانسی استفاده شده در رادارها بیشتر Mega ؛ giga ؛ peta ؛ exa ؛ zetta و VHF میباشد .بیشتر رادارهای متداول در باند فرکانسی 220mHz تا 35GHz کار می کنند. رادارهای ماوراءِ افق ( oTh ) در باند فرکانسی 4 تا 5 مگاهرتز کار می کند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علومِ مخابرات) رادار های اهداف گسترده P18 (رادار های باند VHF)
نویسنده : افشین رشید
نکته : در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. با نماد P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف (رادار های اهداف بزرگترP18) جزو اهداف گسترده یا P هم گفته می شود.
رادار های اهداف بزرگتر P18 یک رادار هشدار اولیه همه منظور است که در باند VHF کار می کند.این رادار توسعه بیشتر رادار P-12 است و از مفهوم آنتن، فرستنده و استفاده می کند. آنتن چهار آنتن یاگی برای الگوی آنتن باریکتر دریافت کرد. دوبلکسر تغییر کرد زیرا تقسیم توان بین دو صفحه آنتن مستقیماً در آنتن ایجاد می شود. مسیر دریافت یک پیش تقویت کننده نویز کم، در ابتدا یک لوله موج در حال حرکت دریافت کردو بعداً یک تقویت کننده حالت جامد. در مسیر گیرنده، برخی از بلوکها از P-12 منتقل شدند، اما سوئیچهای الکترونیکی داخلی علاوه بر ترانزیستورهای اثر میدان برای کنترل راه دور دریافت کردند. پردازش رادار پس از نشان دادن هدف متحرک (MTI)، تولید پالس همزمان و سیستم کوپلینگ ترانزیستوری شد.
نسخههای بعدی و به روز شده یک سیستم دیجیتال MTI دریافت کرد که در سطح بینالمللی نیز به عنوان یک کیت مقاومسازی ارائه شد. بلوک های تولید پالس ماشه، لوله های ذخیره پتانسیل و بلوک جبران با سیستم جدید جایگزین می شوند.نمایش داده های رادار در نسخه اصلی روی دو محدوده PPI انجام می شود که یکی از آنها تا فاصله 500 متری با تمام گزینه های کنترل از راه دور قابل تعویض است. برای آزمایشی، یک A-Scope نیز وجود دارد.کنترل چرخش آنتن یک سیستم سروو دنبال کننده با ورودی های کنترلی متعدد است. بنابراین، میتواند با ایستگاههای راداری دیگر کار کند، سپس میتواند ویدیوی P-18 را علاوه بر آن بر یا به جای خود نشان دهد. به همین منظور، ارزیابی پژواک های خارجی می تواند در P-18 یا از واحد نمایش از راه دور آن انجام شود.
موجودی یک رادار P-18 همیشه یک واحد رادار ثانویه است. بسته به محدوده، این یک NRS-12 کدگذاری ساده یا یک سیستم "Parol" پیچیده تر است. در حالی که NRS-12 هنوز می تواند در P-18 بارگیری شود، سیستم "Parol" به یک دستگاه همراه با یک تریلر نیاز دارد.P-18 را می توان خیلی سریع جابجا کرد. این بر روی دو کامیون تمام زمینی (اورال) نصب شده است که هر کدام دارای یک تریلر دو محوره هستند. این رادار بسیار در منطقه اروپای شرقی و جهان سوم برای ManPADها (Strela، Igla) استفاده می شود. همچنین برای استقرار موشک های بزرگتر (به عنوان مثال: همراه با ارتفاع یاب ) به عنوان رادار هدف برای مجموعه موشکی AA-SA-2 "Guideline" استفاده می شود.
نوسازی و به روز رسانی رادار p18
نوسازی و به روز رسانی رادار p18 پیشنهادی بر کاستی های ذکر شده در سیستم اصلی رادار p18 میباشد و به مشکلات تشخیص هدف رادار p18 غلبه می کند و پیشرفت های قابل توجهی را در عملکرد، قابلیت اطمینان و نگهداری ارائه می دهد.رادار P-18 یک رادار هشدار اولیه متحرک دو بعدی است که در باند VHF کار می کند. از مزیتهای اصلی رادار P-18 میتوان به برد طولانی و توانایی شناسایی حتی اهداف نامرئی که از فناوری رادارگریز استفاده میکنند اشاره کرد. اندازه آنتن VHF مانع از ادغام آن در موشک هایی می شود که برای از بین بردن رادارها استفاده می شوند و این امر مقاومت سیستم را در برابر حمله دشمن افزایش می دهد. علیرغم ساختار مکانیکی بسیار قابل اعتماد و نسبتاً ساده، سیستم های رادار اصلی به دلیل تجهیزات الکترونیکی قدیمی و منسوخ شده و نرم افزار نامناسب نمی توانند نیازهای امروزی را برآورده کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات)رادارهای اهداف وسیع P17
نویسنده : افشین رشید
نکته:در ساختار رادارهای رادارهای (اهداف وسیع P17) گستردگی این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد.
مهمترین اعمالی که یک رادارهای (اهداف وسیع P17) می تواند انجام دهد عبارتند از : 1 -واضح سازی اهداف ، 2 -آشکارسازی ، 3 -اندازه گیری ، 4 -دسته بندی
واضح سازی اهداف مربوط به توانایی رادارهای (اهداف وسیع P17) در جداسازی سیگنال هدف مطلوب از دیگر اهداف و جداسازی سیگنال مطلوب از سیگنالهای نامطلوب (نویز و موانع) می باشد . در حالت ایده آل می خواهیم که سیگنال اهداف مختلف مستقل از نزدیکی آنها به یکدیگر، از هم متمایز باشند . یکی از عوامل موثر در قابلیت تمایز بین اهداف، سیگنال ارسالی است. پهنای باند بزرگتر برای سیگنال ارسالی وضوح بهتری در پارامتر فاصله را در پی دارد. در حالیکه طول پالس طولانی تر منجر به وضوح بیشتری در فرکانس می گردد. همچنین خصوصیات آنتن نیز در آن موثر است. آنتن ها یی با پهنای باند فضایی کوچک وضوح بهتری را در موقعیت هدف نتیجه می دهد. عمل آشکارسازی شامل تشخیص حضور سیگنال بازگشتی از هدف مطلوب است. این مسئله به ظاهر ساده بنظر می رسد، اما در عمل به علت وجود سیگنال های ناخواسته و نویز گیرنده، عملی پیچیده است. می توان با طراحی مناسب گیرنده و ارسال سیگنالی با انرژی بیشتر در هر پالس اثر نویز را کاهش داد. همچنین رادارهای (اهداف وسیع P17) با طراحی سیگنال ارسالی و روشهای پردازش سیگنال می توان میزان حضور سیگنال موانع را کم کرد. برای مشخص شدن محل جسم به تعریف دستگاه مختصات نیاز داریم.
رادارهای (اهداف وسیع P17) قادرند موقعیت هدف در فضای سه بعدی، بردار سرعت هدف (شامل سرعت آن در سه مولفه فضا)، جهت زاویه ای و بردار سرعت زاویه ای (نرخ تغییر زاویه در هر دو مولفه زاویه ای) را نیز بدست آورند. تمام این اندازه گیری ها می تواند بطور همزمان برای چند هدف در شرایطی که نویز و موانع نیز حضور دارند، محاسبه شود. اندازه سرعت شعاعی هدف با تغییر فاصله در یک بازه زمانی و یا از طرق شیفت فرکانس داپلر قابل اندازه گیری است. سرعت مطلق و جهت حرکت یک هدف متحرک با ردیابی آن می تواند بدست آید که از اندازه گیری های رادار از محل هدف در یک بازه زمانی محاسبه می شود. به همین روش می توان سرعت زوایه ای را نیز اندازه گیری کرد.
![]()
در رادارهای (اهداف وسیع P17) بدست آوردن جهت زاویه هدف در یک بعد زاویه ای توسط دو بیم آنتن انجام می شود. این دو بیم به میزان کمی در زاویه جابجا می شوند و با مقایسه اندازه بازگشتی دریافت شده در هر بیم، اندازه زاویه بدست می آید. برای اندازه گیری در هر دو بعد زاویه ای به چهار بیم آنتن نیاز داریم و دقت این اندازه گیری به اندازه آنتن وابسته می باشد . صفحه نمایش رادار برای نشان دادن نتایج بدست آمده به صورت بصری برای کاربر می باشد و دارای انواع مختلفی است. سه نوع از نمایشگرهایی که امروزه در رادارهای کلاسیک بیشتر مورد استفاده قرار می گیرد در اسکوپ تصویر بالا ، جهت عمودی، تابعی از قدرت سیگنال پوش موج بازگشتی از هدف است. این تابعیت می تواند به صورت خطی یا لگاریتمی باشد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادیوهای دریایی VHF (علوم مخابرات)
_nqre.gif)
رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپرکانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است .استفاده های معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند.
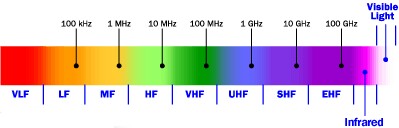
این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی سیستم ناوبری استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده ازخاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.
رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپر کانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است.استفادههای معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات ) انواع رادار و اهداف آن (رادارهای آشکارساز P12 ،جست و جوگر P13 ردیاب ، P14 و غیره P15)
نویسنده: افشین رشید
نکته : انواع رادار و اهداف آن بر اساس معیارهای گوناگون می توان دسته بندی های متفاوتی را برای بیان انواع رادار ارائه داد. رادار هایی که P و رادار هایی که فرستنده و گیرنده آنها در دو فرستنده و گیرنده آنها در یک محل می باشد رادارهای مونو استاتیک PF نامیده می شوند.
دسته بندی دیگر اهداف رادار، فعال یا غیر فعال بودن آنهاست. به اهدافی که از خو د انرژی تشعشع می کنند فعال گفته می شود. سایر اهداف غیر فعال هستند. یک رادار برای سیستم راداری دیگر هدفی فعال بشمار می رود. از جمله اهداف فعال می توان بدن انسان را نیز نام برد. رادارهایی که با طول موج مادون قرمز کار می کنند می توانند تشعشعات ناشی از حرارت بدن را دریافت کنند.
بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.
اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. P نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
اهداف متحرک اهدافی هستند که نسبت به رادار دارای حرکت اند. اگر رادار بر روی زمین به طور ساکن باشد، اهداف طبیعی مانند جنگل یا زمین چمنزار حرکات نسبتا کندی را دارا هستند و پخش شدگی کمی در طیف فرکانسی سیگنال دریافتی ایجاد می کنند. باران و شکل های مشابه نیز دارای چنین حالتی هستند. قابل توجه بودن اثر سایر پدیده های آب و هوایی مانند طوفان، گردباد و غیره به فرکانس کاری رادار بستگی دارد. اهدافی مانند موشک، هواپیمای جت، ماهواره ها به میزانی سریع هستند که جابجایی طیفی قابل توجهی (ناشی از داپلر) در سیگنال دریافتی نسبت به سیگنال ارسالی ایجاد می کنند. در حالاتی که رادار متحرک است تمامی اهداف ساکن بر روی زمین متحرک در نظر گرفته می شوند. در ایجاد داپلر سرعت نسبی رادار و هدف نسبت به هم مطرح می باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات )کاربرد تبدیلات زمان-فرکانس در پردازش سیگنال راداری LPI
نویسنده: افشین رشید
نکته: یکی از موضوعات مهمی که در رادارهای LPI اهمیت ویـژه ای پـیـدا میکند تکنیک فشرده سازی پالس میباشد. در یک تقسیم بندی کلی روشهای فشرده سازی پالس به دو دسته کلی فشرده سازی پالس بـامدولاسیون فرکانس و یا فاز تقسیم میشونـد. در این تحلیل عمل تشخیص حضور یک سیگنال LPI ومشخصات مدولاسیون LPI در مقادیر مختلف سیگنال بـه نـویـز را به دست میآید.
نتایج شبیه سازیهای صورت گرفته برای انواع سیگنالهایِ LPI راداری آمده است. طبق این نتایج، توزیع وینر-ویل برای آشکارسازی سیگنال و تشخیـص پـارامـتـرهـای آن در مـورد سیگنالهای FMCW ،کدهای چندفازه و چندزمانه مناسب میباشـد. این توزیع برای کدهای کاستاس،FSK و PSK/FSK به خوبی عـمـل نمیکند. اما برای سیگنال PSK/FSK و FSK تکنیک CWD نـتـایـج بسیارخوبی ارائه میکند.روش مـدولاسـیـون فرکانس به دو دسته مدولاسیون خطی و غیر خطی فرکانس و روش مدولاسیون فازی نیز به دو روش باینری و چند فازی انجام میگیـرد و به سیگنالهای کد شده فاز معرفی میشوند.
تنوع کدهای چند فازی در رادارهای LPI
کدهای چند فازی دنباله هایی طول محدود، با دامنه ثـابـت و فـاز متغییر ϕk هستند که در آنها بر خلاف کدهای باینری مقادیـر ϕk میتواند هر مقداری بین 0 و 2π داشته باشد. افزایش تعداد عناصر یا مقادیر فاز در دنباله، امکان تولید دنباله هایی با طول بلندتر و سـطـح لوب فرعی پایین را میدهد که منجر به بهره پردازشی بـیـشـتـر در گیرنده میشود. از معروفترین کدهای چند فازی که در کاربردهـای راداری مورد استفاده قرارمیگیرند کدهای چندفازی بارکر، کـدهـای فرانک، P1 ،P2 ،P3 و P4 میباشد که در ادامه بررسی میشونـد. لازم به ذکر است که تنوع کدهای چند فازی که در رادار استفاده میشوند بسیار زیاد هستند و در بخش رادار LPI فقط دو دسته از این کدهـا (فرانک و بارکر) استفاده میگردد.
(کد های فرانک ) شناسایی سیگنالهای کـد شده فازی در رادارهای LPI
این کد با مدولاسیون خطی فرکانس و کدهای بارکر ارتباط نزدیکـی دارد که به دلیل دستیابی به سطح لوبهای فرعی پایین در رادارهـا مورد استفاده قرار گرفته اند. اینکد از تقریب پله ای سـیـگـنـال بـا مدولاسیون فرکانس خطی با M پله فرکانسی و M نـمـونـه در هـر فرکانس حاصل میشود. پس شکل موج فرانک شامل یک سیگنال بـا دامنه ثابت میباشد که مدولاسیون فاز آن به وسیله فازهایی مطـابـق با سیستم رادار انجام میشود.
(کدهای بارکر) کاربرد تبدیلات زمان-فرکانس در پردازش سیگنال راداری LPI
ایده اساسی رادارهای LPI استفاده از پخش کردن توان تشعشع یافته در حوزه زمان و حوزه فرکانس (سیگنال های طیف گسـتـرده)، به منظور تولید چگالی طیف توان زیر سطح نویزِ ورودیِ گیرندة شنود میباشد. بنابراین برای اینکه گیرندة شنود بتواند این سیگنـالهـا را آشکارسازی کند به گین پردازشی بالایی نیاز دارد که معـمـولاً ایـن گین پردازشی در قسمت پردازش سیگنال گیرنده دیجیتال بـهدسـت میآید. احتمال پایین شنود سیگنالهای رادار LPI قابلیت آشکـارسـازی گیرنده های شنود امروزی را با مشکل مواجه کـرده اسـت. مـیـزان موفقیت یک رادار LPI ،به میزان سخت بودن آشکارسازی سیـگـنـال آن برای گیرندههای شنود، وابسته میباشد. نشان داده شده کـه بـا پردازشهای خاص در قسمت پردازش سیگنال گیرنده دیـجـیـتـال میتوان میزان LPI بودن رادار را کاهش داد یا آن را از LPI بـودنخارج کرد.برای استخراج اطلاعات سیگنال، تبدیل فوریه به عنوان ابزار اصلی پردازش سیگنالها در شاخه های مختلف مورد استفاده قرار میگیـرد ولی این تبدیل ضعف های کلیدی دارد که مرتبط به پایه های مختلـط آن میباشد. یکی از ضعف های تبدیل فوریه این است که برای تحلیل سیگنالهای غیر ایستان و سیگنالهای دارای تغیرات ناگهانی مناسب نمیباشد. تبدیل فوریه برای یک سیگنال نشان میدهد که سیگـنـال مورد نظر دارای چه فرکانسهایی میباشد ولی نمیتواند زمان وقـوع هر فرکانس را نمایش دهد. بنابراین ضعف اساسی تبدیل فرکانس راداری LPI ایـن است که در تبدیل به حوزة فرکانس اطلاعات زمانی از بیـن مـیرود. برای غلبه بر این مشکل باید در این تبدیل اصلاحاتی صورت گیرد تا بتواند در تحلیل سیگنالهای غیر ایستان مفید باشد. برای این منظور برخی تبدیلات خطی و غیر خطی معرفی شدند کـه در تـبـدیـلات QMFB به طور خطی نظیر تبدیل فوریه زمان کوتاه، تبدیل ویولت و همزمان نمیتوان تفکیک پذیری فرکانسی و زمانی خوبـی داشـت و برای رسیدن به یک تفکیک پذیری فرکانسی خوب، حجم محاسبـات بالایی نیاز است. برای رفع این مشکلات تبـدیـلهـای غـیـرخـطـی معرفی شدند. توزیع وینر-ویل بهعنوان یکی از چند تکنیک تحـلـیـل زمان فرکانسی غیرخطی در پردازش سیـگـنـال ذکـر شـده اسـت.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
اِرتقای سامانه های مخابراتی اِلکترونیکی دریایی در کِشتی ها و سیستم های مخابراتی ناوبری (علوم مخابرات و الکترونیک)
نویسنده: افشین رشید
سیستم مخابراتی باند VHF و (SSBـHF / MF) همچنین باید اولین موردی باشد که درهنگام نصب یا ارتقای سامانه های مخابراتی الکترونیکی در هر کشتی، و سیستم مخابراتی ناوبری به کار گرفته شود . با این حال، برای بسیاری از دریانوردان، نیازهای مخابرات دریایی خود را فراتر از محدوده VHF گسترش میدهند. برای این افراد، باید یک باند متوسط / بسامد متوسط (SSBـHF / MF) مورد توجه قرار گیرد. رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپر کانتینِر بَر ها (کِشتی های باری بسیار بزرگ) تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است .استفاده های معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند.
این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی سیستم ناوبری استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده ازخاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپر کانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است.
استفاده های معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند. درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی شما استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده از خاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد. اساساً 4 دسته ارتباطات دریایی وجود دارد. شرایط اضطراری شرایط فوری شرایط ایمنی شرایط عادی (معمولی) در داخل این دسته ها از 3 سیگنال اضطراری شناخته شده بین المللی برای ارتباطات صوتی استفاده میشود: MAYDAY با تلفظ DAYـMAY :این سیگنال شرایط اضطراری است و تنها نشان میدهد که کشتی در شرایط خطرناک قرار گرفته و نیاز به کمک فوری دارد. PANـPAN :این سیگنال شرایط فوری است و زمانی استفاده میشود که ایمنی کشتی یا فرد در معرض خطر باشد. SECURITE با تلفظ ”TAY – A – CURE – SAY :”این سیگنال شرایط ایمنی است و برای مشاوره دادن به دیگران در مورد ناوبری مهم یا هشدارهای آب و هوایی که ممکن است ایمنی دیگر کشتیها را تحت تأثیر قرار دهد مورد استفاده قرار میگیرد. وضعیت اضطراری در داخل سه دسته تقسیم شده است، به این معنی که هرکدام از این تماس ها باید در کانال 16 ایجاد شود، زیرا بسیاری دیگر ایستگاه های ساحلی در بسامد 7.24 به گوش هستند. اولویت این سیگنال ها به ترتیب زیر میباشد: ایمنی (SECURITE )بالاتر از هر ارتباطی عادی (معمولی) است. ارتباطات فوری (PANـPAN )مقدمه ای بر ارتباطات ایمنی میشود. ارتباط اضطراری (MAYDAY )بالاتر از همه دسته های دیگر ارتباطات است. دسته ارتباطات دریایی وجود دارد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(رادار دهانه ترکیبی) Synthetic-aperture radar رادار روزنه مصنوعی و فناوری سار (آرایه ترکیبی SAR) _ (علومِ رادار )
نویسنده: افشین رشید
نکته: (رادار دهانه ترکیبی) Synthetic-aperture radar رادار روزنه مصنوعی و فناوری سار هم نامیده می شود با تکیه بر همان فناوری رادار در حال تصویر برداری است و نهایتاً یک تصویر دو بعدی تولید می کند.
(رادار دهانه ترکیبی) Synthetic-aperture radar برای تهیهی یک نقشه دقیق از زمین و عوارض موجود در آن لازم است از یک آنتن طویل استفاده کنیم اما امکان ساخت و بکارگیری راداری با آنتن بزرگ جهت دستیابی به رزولوشن بالا از عوارض زمینی امکانپذیر نیست. برای تهیه ی یک نقشه دقیق از زمین و عوارض موجود در آن لازم است از یک آنتن طویل استفاده کنیم اما امکان ساخت و بکارگیری راداری با آنتن بزرگ جهت دستیابی به رزولوشن بالا از عوارض زمینی امکانپذیر نیست. برای رفع این مشکل از تکنیک ردار دریچه مصنوعی یا SAR استفاده میشود. در این تکنیک هواگرد در حال حرکت اقدام به ارسال دریافت امواج کرده و بدین ترتیب یک آنتن طویل شبیه سازی میشود.
برای رفع این مشکل از تکنیک ردار دریچه مصنوعی یا SAR استفاده میشود. در این تکنیک هواگرد در حال حرکت اقدام به ارسال دریافت امواج کرده و بدین ترتیب یک آنتن طویل شبیه سازی می شود.رادار ها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند.
بر اساس یک تقسیم بندی کلاسیک، رادار های تصویرگر را میتوان به دو دسته بزرگ یعنی رادار های آرایه – حقیقی (RAR) و رادار های آرایه – ترکیبی (SAR) تقسیم بندی کرد که هر کدام ویژگی ها و اهمیت خاص خود را دارند. رادار های روزنه مصنوعی یا همان سار Synthetic Aperture Radar به نوعی از رادار ها اطلاق میشود که برای امور نقشه برداری و تصویر برداری از سطح زمین به کار می رود. معمولا این فن آوری در هواپیماهای شناسایی با اهداف نظامی و غیر نظامی کاربرد دارد.در این رادار ها موج ارسالی به صورت یک پالس با فرکانس مشخص به نام PRF(فرکانس تکرار پالس) می باشد. نسبت دوره تناوبPRT زمان تکرار پالس به عرض پالس را نسبت به زمان کار می گویند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
در تئوری آنتن ، یک رادار آرایه فاز phased array
نویسنده : افشین رشید
نکته: در تئوری آنتن ، یک رادار آرایه فاز معمولاً به معنای یک آرایه اسکن شده الکترونیکی ، یک آرایه کنترل شده توسط کامپیوتر است که یک پرتوی امواج رادیویی ایجاد می کند که می تواند به صورت الکترونیکی هدایت شود تا در جهات مختلف بدون حرکت آنتن ها به آن اشاره کند.
در رادار آرایه فاز phased array پرتوی امواج رادیویی که در یک جهت خاص حرکت می کنند. تغییر دهنده های فاز موج های رادیویی را که به تدریج از خط بالا می روند به تأخیر می اندازند بنابراین هر آنتن دیرتر از آن در زیر موج خود موج موج خود را ساطع می کند. این امر باعث می شود که موج هواپیمای حاصل در یک زاویه به محور آنتن هدایت شود. با تغییر، تغییر فاز ، کامپیوتر می تواند فوراً زاویه پرتو را تغییر دهد.در یک آنتن آرایه ، جریان فرکانس رادیویی از فرستنده با فاز صحیح به آنتن های فردی تغذیه می شود.به گونه ای که امواج رادیویی از آنتن های جداگانه به یکدیگر اضافه شده و تابش را در جهت دلخواه افزایش می دهند ، در حالی که برای سرکوب اشعه در جهت های ناخواسته لغو می شوند. در یک آرایه فاز ، نیرو از فرستنده از طریق دستگاههایی به نام شیفت فاز ، کنترل شده توسط یک سیستم رایانه ای ، به آنتن ها تغذیه می شود ، می تواند فاز را به صورت الکترونیکی تغییر دهد ، بنابراین پرتوی امواج رادیویی را به جهت دیگری هدایت می کند. از آنجایی که این آرایه برای دستیابی به دقت بالا باید از بسیاری از آنتن های کوچک (گاهی اوقات هزاران آنتن کوچکتر) تشکیل شود ، آرایه های مرحله ای عمدتاً در انتهای فرکانس بالا طیف رادیویی ، در باند UHF و ماکروویو کاربرد دارند . که در آن عناصر آنتن به راحتی کوچک هستند.
برای شناسایی هواپیماها و موشکها ، آرایه های مرحله ای برای استفاده در سیستم های راداری نظامی اختراع شد تا بتوانید پرتوی از امواج رادیویی را به سرعت در سراسر آسمان هدایت کنید. این سیستم ها اکنون به طور گسترده مورد استفاده قرار گرفته و در برنامه های غیر نظامی گسترش یافته است. از اصل آرایه فاز نیز در آکوستیک استفاده می شود و از آرایه های مرحله ای مبدل های آکوستیک در اسکنر ها و سیستم های سونار نظامی استفاده می شود. اصطلاح "آرایه فاز" نیز در حدی کمتر برای آنتن های آرایه ای بدون تحرک استفاده میشود.که در آن فاز قدرت تغذیه و در نتیجه الگوی تابش آرایه آنتن ثابت است. به عنوان مثال ، آنتن های رادیویی AM متشکل از رادیوهای مستر چند تغذیه شده برای ایجاد یک الگوی خاص تابش ، "آرایه های مرحله ای" نیز گفته می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
آنتن سَهموی رادار (Parabolic Antenna) آنتنی بازتابنده با بهرهٔ بالا
نویسنده : افشین رشید
نکته: آنتن سَهموی رادار (Parabolic Antenna) آنتنی بازتابنده با بهرهٔ بالا است که برای ارتباطات دادهای و همچنین سیستم موقعیت رادیویی (رادار) در باندهای UHF و SHF طیف الکترومغناطیسی به کار می رود. طول موج نسبتاً کوتاه تشعشع الکترومغناطیسی در این فرکانس ها اجازه می دهد تا بازتاب کننده ها، امواج را به طور جهت دار ارسال یا دریافت کنند.
آنتن سَهموی (Parabolic Antenna) نوعی از آنتن های گیرنده است که با استفاده از یک سطح بازتابنده یا پارابولیک برای هدایت امواج رادیویی و فرکانسهای مخابراتی استفاده میشود.قدرت آنتن پارابولیک در رادار ها برای اکتشاف ریز پرنده ها مانند پهباد بسیار بالا است.این نوع از آنتن گیرنده در مخابرات یکی از بهترین انخابها برای مناطقی است که نویز بالا دارند و سطح سیگنال دریافتی بسیار پایین است .آنتن سَهموی (Parabolic Antenna) در اصل کار عدسی را در رادار انجام میدهند ، هر آنتن پارابولیک یک واحد دریافت کننده در فاصله کانونی خود قرار دارد ، سیگنال دریافتی توسط گرید یا صفحه آنتن به واحد دریافت کننده میفرستد . اما دلیل اینکه دارای بشقاب توری مانند هستند ، برای عبور جریان هوا است تا لرزش آنتن کم بشود ،هم به صورت عمودی و هم افقی مورد استفاده قرار میگیرند.
مزیت اصلی آنتن های رفلکتوری پارابولیک در رادار داشتن دایرکتیویته و در نتیجه گین بالاست که استفاده آنها را در رنج وسیعی از باند مایکروویو جهت انتقال دیجیتال و آنالوگ اطلاعات، ضروری نموده است. این کاربردها شامل انتقال رادیویی نقطه به نقطه (Line of Site)، ایستگاه های زمینی راداری، کاربرد های ردیابی، رادار کشف ریز پرنده (پهباد) ، اهداف نظامی و ... می باشد.هر دو گونه آنتن سَهموی (Parabolic Antenna) یعنی دو رفلکتوری و تک رفلکتومی بسته به چگونگی سیستم تغذیه (Feeding) به دو نوع تغذیه متقارن یا هم محور (front-fed) و نامتقارن تقسیم می شوند.هر کدام از آنتن های فوق دارای مزایا و معایب ویژه ای است که ضرورت استفاده آنها را در کاربرد خاصی معینی می نماید. آنتن های غیر هم محور اثر سد دهانه (aperture blocking) را کاهش داده ولی در عوض دریافت پلاریزاسیون ناخواسته (XPOL) را افزایش می دهد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.
نویسنده: افشین رشید
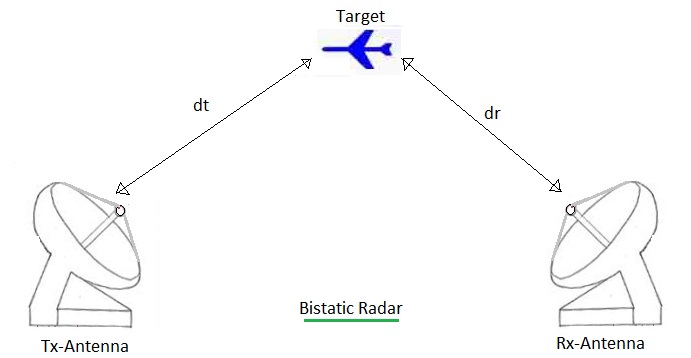
اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. P نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
اهداف متحرک اهدافی هستند که نسبت به رادار دارای حرکت اند. اگر رادار بر روی زمین به طور ساکن باشد، اهداف طبیعی مانند جنگل یا زمین چمنزار حرکات نسبتا کندی را دارا هستند و پخش شدگی کمی در طیف فرکانسی سیگنال دریافتی ایجاد می کنند. باران و شکل های مشابه نیز دارای چنین حالتی هستند. قابل توجه بودن اثر سایر پدیده های آب و هوایی مانند طوفان، گردباد و غیره به فرکانس کاری رادار بستگی دارد. اهدافی مانند موشک، هواپیمای جت، ماهواره ها به میزانی سریع هستند که جابجایی طیفی قابل توجهی (ناشی از داپلر) در سیگنال دریافتی نسبت به سیگنال ارسالی ایجاد می کنند. در حالاتی که رادار متحرک است تمامی اهداف ساکن بر روی زمین متحرک در نظر گرفته می شوند. در ایجاد داپلر سرعت نسبی رادار و هدف نسبت به هم مطرح می باشد .
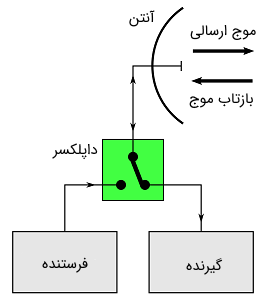
دسته بندی دیگر اهداف رادار، فعال یا غیر فعال بودن آنهاست. به اهدافی که از خو د انرژی تشعشع می کنند فعال گفته می شود. سایر اهداف غیر فعال هستند. یک رادار برای سیستم راداری دیگر هدفی فعال بشمار می رود. از جمله اهداف فعال می توان بدن انسان را نیز نام برد. رادارهایی که با طول موج مادون قرمز کار می کنند می توانند تشعشعات ناشی از حرارت بدن را دریافت کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار (تپی) Pulsed Radar (علوم مخابرات)
نویسنده: افشین رشید
نکته : رادار های پالسی Pulsed (تپی) راداری است که ابتدا یک پالس ارسال می کند و سپس منتظر رسیدن اکو اهداف می ماند. این امر مانع از تداخل بین گیرندگی و فرستندگی میشود و امکان استفاده از یک آنتن واحد به عنوان گیرنده و فرستنده را فراهم می آورد. با اندازه گیری زمان بین ارسال و دریافت می توان برد هدف را بدست آورد.
رادار پالسی Pulsed Radar به روشی بسیار ساده کار می کند. امواج الکترومغناطیسی ، مانند امواج رادیویی یا مایکروویو ، توسط یک فرستنده با سرعت نور (2.93 X 10 8 m / s) ارسال می شوند ، از اشیا پرش می کنند و به گیرنده منعکس می شوند. امواج الکترومغناطیسی برخلاف امواج صوتی می توانند انرژی را از طریق خلا منتقل کنند. به همین دلیل از امواج الکترومغناطیسی برای ارتباط با ماهواره ها در فضای عمیق استفاده می شود.یک سیستم راداری اساسی از یک فرستنده ، سوئیچ ، آنتن ، گیرنده و یک صفحه نمایش خروجی تشکیل شده است. همه چیز با فرستنده شروع می شود زیرا یک پالس انرژی بالا را از طریق آنتن ارسال می کند. پس از انتقال کامل سوئیچ کنترل به گیرنده و آنتن آماده دریافت می شود. پس از دریافت سیگنال ، کنترل دوباره به فرستنده باز می گردد. سوئیچینگ بین فرستنده و گیرنده تا 1000 برابر در ثانیه اتفاق می افتد.اطلاعات مفید را می توان از داده های به دست آمده از سیگنال برگشتی محاسبه کرد. سیگنال برای قدرت ، زمان صرف شده برای بازگشت و فرکانس آن تجزیه و تحلیل می شود. از این اطلاعات می توانیم سرعت ، فاصله ، جهت هدف را تعیین کرده و حتی یک تصویر ایجاد کنیم.اگر چه سرعت سیگنال منعکس نشده تغییر می کند ، اما فرکانس بسته به سرعت هدف تغییر می کند. این به عنوان اثر داپلر شناخته می شود. هر چه هدف با سرعت بیشتری حرکت کند ، فرکانس سیگنال برگشتی نیز بالاتر می رود.
Pulse modulator : تعدیل کننده پالس - سیگنال مدولاسیون شده با پالس تولید می کند و به فرستنده اعمال می شود.
Transmitter فرستنده - سیگنال مدولاسیون شده با پالس را که قطاری از پالس های تکراری است ، منتقل می کند.
Duplexer - این یک سوئیچ مایکروویو است که آنتن را به طور متناوب به بخش فرستنده و گیرنده متصل می کند. هنگامی که دوبلکسر آنتن را به فرستنده متصل می کند ، آنتن سیگنال تعدیل شده پالس را انتقال می دهد. هنگامی که دوبلکسر آنتن را به تقویت کننده کم صدا RF متصل می کند ، به همین ترتیب ، سیگنالی که توسط آنتن دریافت می شود به تقویت کننده RF کم سر و صدا داده می شود.
Low Noise RF Amplifier تقویت کننده RF کم سر و صدا - این سیگنال ضعیف RF را که توسط آنتن دریافت می شود ، تقویت می کند. خروجی این آمپلی فایر به میکسر متصل است.
Local Oscillator نوسان ساز محلی - سیگنالی با فرکانس پایدار تولید می کند. خروجی نوسان ساز محلی به میکسر متصل است.
Mixer میکسر - می دانیم که میکسر می تواند مجموع و تفاوت فرکانس های اعمال شده روی آن را تولید کند. از این میان ، تفاوت فرکانس ها از نوع فرکانس متوسط (IF) خواهد بود.
IF Amplifier تقویت کننده IF - تقویت کننده IF سیگنال فرکانس متوسط (IF) را تقویت می کند. آمپلی فایر IF که در شکل نشان داده شده است فقط فرکانس متوسط را می دهد که از میکسر به دست می آید و آن را تقویت می کند. باعث بهبود نسبت سیگنال به نویز در خروجی می شود.
Detector ردیاب - سیگنال را که در خروجی IF Amplifier بدست می آید از بین می برد.
Video Amplifier تقویت کننده تصویری - همانطور که از نامش پیداست ، سیگنال تصویری را که در خروجی ردیاب بدست می آید ، تقویت می کند.
Display صفحه نمایش - به طور کلی ، سیگنال ویدئویی تقویت شده را بر روی صفحه CRT نمایش می دهد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار پالس فشرده(Pulse Compression)
نویسنده : افشین رشید
این رادار از پالس های با عرض زیاد استفاده می نماید و برای افزایش دقت از مدولاسیون فاز یا فرکانس در هر پالس استفاده می کند. در نتیجه ضمن افزایش پهنای باند تشخیص دقیق فاصله اهداف نیز حاصل می شود و نسبت به رادار نوع قبلی دارای این مزیت است که توان پیک (حداکثر توان) فرستنده را در حد معتدلی نگاه می دارد .رادار ها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند.مکانیسم عمل همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند.
معمولاً، سیستمهای (رادار پالس فشرده) فرآیند مشابهی را در حوزه دیجیتال به نام فیلتر همسان به کار میگیرند ، جایی که سیگنال دریافتی با نسخه معکوسشده زمان پالس ارسالی در هم میآید. فیلتر تطبیقی اغلب در حوزه فرکانس انجام می شود زیرا پیچیدگی در حوزه زمان معادل ضرب در حوزه فرکانس است و فرآیند را سریعتر می کند. از آنجایی که پالس اولیه با زمان معکوس است، خروجی فیلتر شده با عرض پالس که همان 1 ثانیه است به تاخیر می افتد.به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که آیا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند ؛ حتی سرعت جسم نیز بخوبی قابل محاسبه است.کاربرد ها نظارت و رهگیری هواپیماها و موشکها نظارت و رهگیری اهداف دریایی یا زمینی نظارت و رهگیری اجرام فضایی هواشناسی اندازه گیری سرعت وسایل نقلیه رادار؛ برای تصویر دو-بعدی و سه-بعدی پیداکردن مین در زمین فرود(برای نمونه برای هواپیما) دقیق عکسبرادری از کرههای دیگر با رادار تصویری پرهیز تصادم پیدا کردن آب در مناطق شنزار و خشک نظارت بر اهداف جنبنده در زمین نظارت بر اهداف جنبنده در مناطق پردرخت و جنگل های انبوه از موارد کاربرد (رادار پالس فشرده) میباشد.
فشرده سازی پالس با مدولاسیون فرکانس غیر خطی مزایای واضحی دارد. برای مثال، دیگر نیازی به وزن دهی دامنه ای برای سرکوب لوب های جانبی به دست آمده، به اصطلاح لوب های کناری زمانی ندارد، زیرا شکل مدولاسیون از قبل عملکرد وزن دهی دامنه لازم را انجام می دهد.تنظیم فیلتر با لبه های بسیار تندتر و با این وجود لوب های جانبی کم در حال حاضر امکان پذیر است. به این ترتیب، از تلفات نسبت سیگنال به نویز که در غیر این صورت به دلیل وزن دهی دامنه رخ می دهد، جلوگیری می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادارهای پالسی با قدرت تفکیک بالا (High Resolution)
نویسنده : افشین رشید
در این رادارها عرض پالسی بسیار کوچک انتخاب می شود و چون میزان دقت در تشخیص فاصله توسط عرض پالسی مشخص می گردد دارای دقت بالایی در تشخیص فاصله هدف می باشد. (هر قدر عرض پالس کوچکتر باشد محاسبه فاصله دقیقتر است.) این رادارها برای آشکار سازی اهداف ساکن در حضور کلاتر (سیگنالهای برگشتی ناخواسته به صفحه رادار) و نیز تشخیص یک هدف در میان چند هدف نزدیک به هم قابل استفاده می باشد.در مواردی یک سیستم رادار دارای بیش از یک فرستنده و گیرنده می باشد که به صورت پالسی خوانده می شود. یک شبکه عمل می کنند. این سیستم P8F ها مولتی استاتیک پالسی، راداری است که به طور همچنین رادارها را می توان براساس سیگنال ارسالی آنها دسته بندی کرد. نوع CWP9F پیوسته و معمولا با دامنه ثابت ارسال می کند. این سیگنال ارسالی می تواند با مدولاسیون FM و یا با فرکانسی ثابت فرستاده شود. هنگامی که شکل موج ارسالی به صورت پالسی است ( بامدولاسین FM و یا بدون آن) ، رادار پالسی P و غیر فعالP1F نامیده میشود. همچنین بر اساس وجود فرستنده یا نبود آن، رادارها بترتیب به دو دسته فعال P10FP تقسیم می شوند.
بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.
اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. پالسی نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
موج رادار پالسی رادار موج پیوسته(سینوسی)
نویسنده : افشین رشید
مکانیسم عمل همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند. به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که آیا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند ؛ حتی سرعت جسم نیز بخوبی قابل محاسبه است.کاربرد ها نظارت و رهگیری هواپیماها و موشکها نظارت و رهگیری اهداف دریایی یا زمینی نظارت و رهگیری اجرام فضایی هواشناسی اندازه گیری سرعت وسایل نقلیه رادار؛ برای تصویر دو-بعدی و سه-بعدی پیداکردن مین در زمین فرود(برای نمونه برای هواپیما) دقیق عکسبرادری از کرههای دیگر با رادار تصویری پرهیز تصادم پیدا کردن آب در مناطق شنزار و خشک نظارت بر اهداف جنبنده در زمین نظارت بر اهداف جنبنده در مناطق پردرخت و جنگل های انبوه از موارد کاربرد رادار میباشد.
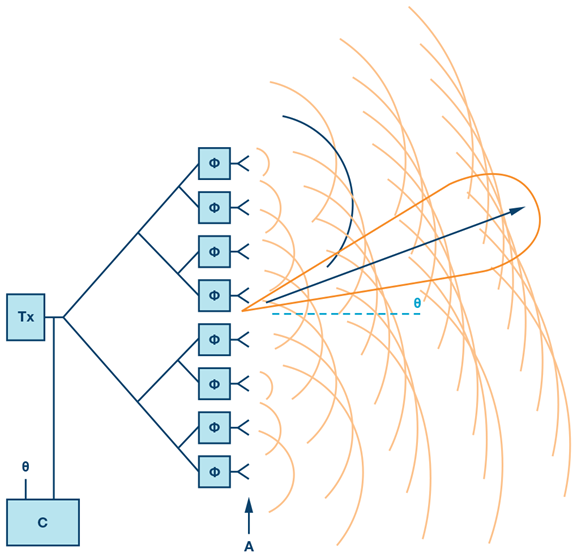
در ساختار رادار های پالسی آنتن هایی که به صورت آرایه آنتن ساخته شده اند و از روش ویژه ای در تغذیه بهره می گیرند ، ترکیب شده اند: عناصر تک آنتن همیشه به طور فاز تبدیل نمی شوند. برای اهداف مختلف مبالغ و اختلافات مختلفی از انرژی دریافتی ایجاد می شود.تمام عناصر آنتن به صورت فاز تغذیه می شوند و الگوهای تابش خلاصه می شوند. برخی از گروه ها فقط در زمان پذیرش خلاصه می شوند و مبالغ یا اختلافات آنها کانالهای دریافتی را دریافت می کند. سپس تمام سیگنال ها به عنوان یک عملکرد پردازنده ویدیویی مقایسه می شوند و از تفاوت آنها برای تخمین دقیق تر وضعیت آزمایشی هدف استفاده می شود.نام گذاری رادار های پالسی از آنجایی است که این رادار به کمک چند المان دریافت کننده (به طور معمول چهار المان) و تاباندن تنها یک پالس اطلاعات مورد نیاز از هدف را استخراج می کنند. از طریق مقایسه فاز و دامنه امواج ورودی به هر المان و انجام برخی محاسبات اطلاعات مورد هدف نیاز استخراج خواهد شد.سیستم های یکپارچه معمولاً حاوی پردازش پیشرفته ای هستند تا اطلاعات کد هدف با کیفیت بهتری داشته باشند. یک پالس منفرد به اندازه کافی برای اندازه گیری تحمل تک قطبی است (از این رو استفاده از اصطلاح پالسی ) عناصر موجود در آرایه آنتن خطی به دو نیمه تقسیم می شوند. این دو آرایه جداگانه به صورت متقارن در صفحه کانونی در هر طرف محور آنتن رادار قرار می گیرند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار PRF (فرکانس تکرار پالس)
نویسنده: افشین رشید
رادار ها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند .
_ موج رادار پالسی رادار موج پیوسته(سینوسی)
مکانیسم عمل همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند. به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که آیا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند ؛ حتی سرعت جسم نیز بخوبی قابل محاسبه است.کاربرد ها نظارت و رهگیری هواپیماها و موشکها نظارت و رهگیری اهداف دریایی یا زمینی نظارت و رهگیری اجرام فضایی هواشناسی اندازه گیری سرعت وسایل نقلیه رادار؛ برای تصویر دو-بعدی و سه-بعدی پیداکردن مین در زمین فرود(برای نمونه برای هواپیما) دقیق عکسبرادری از کرههای دیگر با رادار تصویری پرهیز تصادم پیدا کردن آب در مناطق شنزار و خشک نظارت بر اهداف جنبنده در زمین نظارت بر اهداف جنبنده در مناطق پردرخت و جنگل های انبوه از موارد کاربرد رادار میباشد.
رادارهای پالسی (Pulse Transmission)
در این رادارها موج ارسالی به صورت یک پالس با فرکانس مشخص به نام PRF(فرکانس تکرار پالس) می باشد. نسبت دوره تناوبPRT زمان تکرار پالس به عرض پالس را نسبت به زمان کار می گویند. رادارهای پالسی با توجه به دوره تناوب و نسبت زمان کار دارای تنوع بوده که به مواردی از آنها اشاره می شود :
۱- رادارهای پالسی معمولی . در این رادارها معمولا عرض پالس در حدود چند میکروثانیه است و نسبت زمان کار بین حدود ۰٫۰۱ تا ۰٫۰۰۱ تغییر می کند. از این رادارها جهت هواشناسی و دیده بانی و مراقبت هوایی استفاده می شود.
۲- رادارهای پالسی با قدرت تفکیک بالا (High Resolution). در این رادارها عرض پالسی بسیار کوچک انتخاب می شود و چون میزان دقت در تشخیص فاصله توسط عرض پالسی مشخص می گردد دارای دقت بالایی در تشخیص فاصله هدف می باشد. (هر قدر عرض پالس کوچکتر باشد محاسبه فاصله دقیقتر است.) این رادارها برای آشکار سازی اهداف ساکن در حضور کلاتر (سیگنالهای برگشتی ناخواسته به صفحه رادار) و نیز تشخیص یک هدف در میان چند هدف نزدیک به هم قابل استفاده می باشد.
۳- رادار پالس فشرده(Pulse Compression) . این رادار از پالس های با عرض زیاد استفاده می نماید و برای افزایش دقت از مدولاسیون فاز یا فرکانس در هر پالس استفاده می کند. در نتیجه ضمن افزایش پهنای باند تشخیص دقیق فاصله اهداف نیز حاصل می شود و نسبت به رادار نوع قبلی دارای این مزیت است که توان پیک (حداکثر توان) فرستنده را در حد معتدلی نگاه می دارد .
رادار موج پیوسته (CW)
این رادار دارای نسبت زمان کار واحد می باشد،یعنی موج ارسالی به صورت پیوسته است . این نوع رادار نیز دارای انواع مختلف به ترتیب زیر است :
۱- رادار موج پیوسته معمولی : در این نوع رادار می توان سرعت و جهت حرکت هدف را در راستای خط واصل رادار تشخیص داد و امکان تشخیص فاصله به دلیل عدم استفاده از هرگونه مدولاسیون وجود ندارد و معمولا در ناوبری هوایی کاربرد دارند .
۲- رادار موج پیوسته مدوله شده فرکانس : در این رادار از مدولاسیون فرکانس برای افزایش پهنای باند و ایجاد امکان تشخیص فاصله استفاده می شود. از مهم ترین کاربردهای این نوع رادار ارتفاع سنجهای هواپیما می باشد.
۳- رادار موج پیوسته چند فرکانسه : در این نوع رادار با توجه به اختلاف فاز موج دریافتی از یک هدف در فرکانسهای مختلف می توان فاصله هدف را تشخیص داد.
رادار روزنه مصنوعی (Synthetic Aperture Radar)
در این رادار معمولا بیم آنتن در جهت عمود بر مسیر حرکت تنظیم می شود و دارای دقت بالایی در زاویه است .
عملکرد آنها مانند یک آنتن ساکن با تعداد زیادی آرایه می باشد. خروجی این نوع رادار یک تصویر با دقت بالا از صحنه ی مورد نظر می باشد. رادار های فوق به دلیل ایجاد تصاویر دقیق کاربرد های فراوانی در علم زمین شناسی و جغرافی و همچنین در امور نظامی پیدا کردند. این رادار حتی قادر به ایجاد تصاویر سه بعدی از اشیا و اهداف می باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(امواج کوتاه بُرد_ متوسط) (مخابرات _سونار) در اقیانوس و دریا
نویسنده: افشین رشید
نکته: یکی از اولین چیزهایی که اکثر مردم در مورد (الکترونیک _ امواج ارتباطی ) دریایی فکر میکنند، VHF است.
سیستم مخابراتی باند VHF و (SSBـHF / MF) همچنین باید اولین موردی باشد که درهنگام نصب یا ارتقای سامانه های مخابراتی الکترونیکی در هر کشتی، و سیستم مخابراتی ناوبری به کار گرفته شود . با این حال، برای بسیاری از دریانوردان، نیازهای مخابرات دریایی خود را فراتر از محدوده VHF گسترش میدهند. برای این افراد، باید یک باند متوسط / بسامد متوسط (SSBـHF / MF) مورد توجه قرار گیرد.رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپرکانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است .استفاده های معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی سیستم ناوبری استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده ازخاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپر کانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است.استفادههای معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی شما استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده از خاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.
اساساً 4 دسته ارتباطات دریایی وجود دارد.
شرایط اضطراری
شرایط فوری
شرایط ایمنی
شرایط عادی (معمولی)
در داخل این دسته ها از 3 سیگنال اضطراری شناخته شده بین المللی برای ارتباطات صوتی استفاده میشود:
MAYDAY با تلفظ DAYـMAY :این سیگنال شرایط اضطراری است و تنها نشان میدهد که کشتی در شرایط خطرناک قرار گرفته و نیاز به کمک فوری دارد.
PANـPAN :این سیگنال شرایط فوری است و زمانی استفاده میشود که ایمنی کشتی یا فرد در معرض خطر باشد.
SECURITE با تلفظ ”TAY – A – CURE – SAY :”این سیگنال شرایط ایمنی است و برای مشاوره دادن به دیگران در مورد ناوبری مهم یا هشدارهای آب و هوایی که ممکن است ایمنی دیگر کشتیها را تحت تأثیر قرار دهد مورد استفاده قرار میگیرد. وضعیت اضطراری در داخل سه دسته تقسیم شده است، به این معنی که هرکدام از این تماس ها باید در کانال 16 ایجاد شود، زیرا بسیاری دیگر ایستگاه های ساحلی در بسامد 7.24 به گوش هستند.
اولویت این سیگنال ها به ترتیب زیر میباشد:
ایمنی (SECURITE )بالاتر از هر ارتباطی عادی (معمولی) است.
ارتباطات فوری (PANـPAN )مقدمه ای بر ارتباطات ایمنی میشود.
ارتباط اضطراری (MAYDAY )بالاتر از همه دسته های دیگر ارتباطات است. دسته ارتباطات دریایی وجود دارد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
سونار Sonar (رادار دریایی) ساختار ، عملکرد و کاربرد ها (علوم مخابرات)
نویسنده: افشین رشید
نکته: برای کاوش و نقشه برداری از اقیانوس مفید است زیرا امواج صوتی نسبت به امواج رادار و نور در آب دورتر حرکت می کنند. در درجه اول از سونار برای تهیه نقشه های دریایی، تعیین مکان خطرات زیر آب برای ناوبری ، جستجو و نقشه برداری از اشیا کف دریا مانند غرق کشتی ها و نقشه برداری از کف کف دریا استفاده می کنند. دو نوع سونار (فعال و منفعل) وجود دارد.
مُبدل های فعال سونار سیگنال صوتی یا نبض صوتی را در آب منتشر می کنند. اگر جسمی در مسیر نبض صدا قرار بگیرد ، صدا از جسم پرش می کند و "اکو" را به مبدل سونار برمی گرداند. اگر مبدل به توانایی دریافت سیگنال مجهز باشد ، قدرت سیگنال را اندازه گیری می کند. با تعیین زمان بین انتشار نبض صدا و دریافت آن ، مبدل می تواند دامنه و جهت جسم را تعیین کند.
سیستم های سونار منفعل
سیستم های سونار منفعل در درجه اول برای تشخیص سر و صدای اشیا ٕ دریایی (مانند زیردریایی ها یا کشتی ها) و حیوانات دریایی مانند نهنگ ها استفاده می شود. برخلاف سونار فعال ، سونار منفعل سیگنال خود را منتشر نمی کند ، این یک مزیت برای کشتی های نظامی است که نمی خواهند پیدا شوند یا برای مأموریت های علمی که متمرکز بر "گوش دادن" بی سر و صدا به اقیانوس هستند. بلکه فقط امواج صوتی را که به سمت آن می آیند تشخیص می دهد. سونار غیرفعال نمی تواند دامنه یک شی را اندازه گیری کند ، مگر اینکه از آن در کنار سایر دستگاه های شنود غیرفعال استفاده شود. چندین دستگاه سونار غیرفعال ممکن است باعث مثلث بندی منبع صدا شود.سونار (ناوبری و بازه صوتی) فناوری است که با استفاده از امواج صوتی موقعیت اجسام در اقیانوس را حس می کند. ساده ترین دستگاه های سونار یک پالس صدا را از مبدل می فرستند و سپس دقیقاً زمان انعکاس پالس های صدا را اندازه می گیرند بازگشت به مبدل. فاصله تا یک جسم را می توان با استفاده از این اختلاف زمان و سرعت صدا در آب (تقریباً 1500 متر در ثانیه) محاسبه کرد. سیستم های سونار پیشرفته تر می توانند اطلاعات اضافی جهت و دامنه را فراهم کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار (پالس دوپلر) Pulse doppler (با موج پیوسته)
نویسنده : افشین رشید
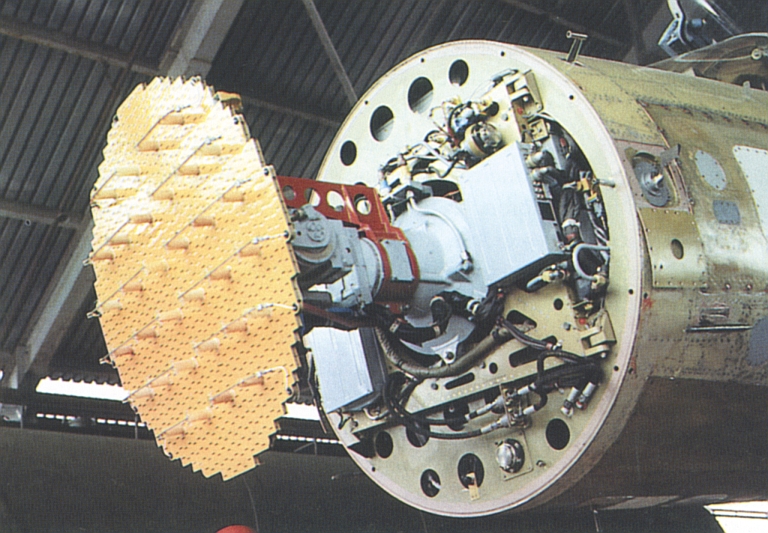
رادار های داپلر برای شناسایی اهداف متحرکی که سطح اکو رادار آنها بسیار کوچکتر از بازگشت شلوغی زمین است استفاده می شوند. اهداف متحرک با استفاده از پدیده داپلر از شلوغی به صورت فراوانی جدا می شوند. رادار های داپلر با موج پیوسته دارای یک قابلیت عملیاتی حداکثر دامنه هستند زیرا نشتی بین فرستنده و گیرنده باعث اشباع گیرنده می شود. این محدودیت در رادار پالس-داپلر با تقسیم زمان در چرخه های انتقال و دریافت برطرف می شود.پردازش سیگنال های راداری پالس داپلر معمولاً به عنوان دنباله ای از مراحل شناخته می شود که به عنوان زنجیره پردازش شناخته می شوند. پردازش سیگنال برای افزایش نسبت سیگنال به نویز و برای افزایش عملکرد تشخیص ، ایجاد تمایز بین اهداف واقعی و تداخل ، درهم ریختگی یا مسدود کردن و استخراج اطلاعات مورد نظر در مورد اهداف که حداقل شامل آنها است ، اعمال می شود. دامنه و سرعت هدف. در حالی که نظم و عملیات دقیق پردازش از رادار به رادار دیگر متفاوت است.
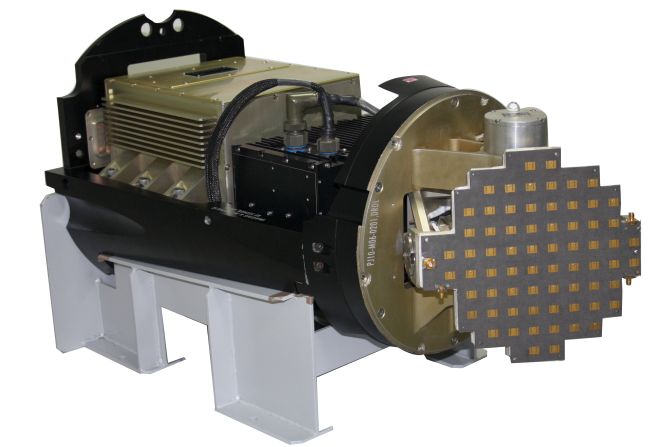
رادار دوپلر پالس سامانه راداری است که نه تنها موقعیت هدف را شناسایی می کند؛ (از قبیل جهت، برد، و ارتفاع) بلکه سرعت شعاعی هدف را نیز اندازه می گیرد. این رادار از اثر دوپلر برای مشخص کردن سرعت نسبی اشیاء استفاده می کند.
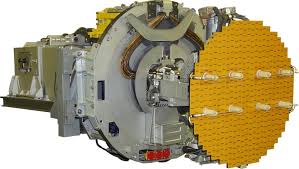
سیستم های راداری داپلر با طراحی خود می توانند اطلاعاتی راجع به حرکت اهداف و همچنین موقعیت آنها ارائه دهند. وقتی پالس امواج رادیویی را منتقل می کند ، سیستم فاز (شکل ، موقعیت و فرم) آن پالس ها را ردیابی می کند.رادار های داپلر برای شناسایی اهداف متحرکی که سطح اکو رادار آنها بسیار کوچکتر از بازگشت شلوغی زمین است استفاده می شوند. اهداف متحرک با استفاده از پدیده داپلر از شلوغی به صورت فراوانی جدا می شوند. رادار های داپلر با موج پیوسته دارای یک قابلیت عملیاتی حداکثر دامنه هستند زیرا نشتی بین فرستنده و گیرنده باعث اشباع گیرنده می شود. این محدودیت در رادار پالس-داپلر با تقسیم زمان در چرخه های انتقال و دریافت برطرف می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار (پالس دوپلر) Pulse doppler اثر داپلر از سیگنال بازگشت (برای تعیین سرعت شِی)
نویسنده : افشین رشید
رادار پالس داپلر نوعی رادار سیستم است که در محدوده تعیین شده به هدف با استفاده از تکنیک پالس زمان بندی، و با استفاده از اثر داپلر از سیگنال بازگشت برای تعیین سرعت شی مورد نظر استفاده میگردد. این ترکیبی از ویژگی های رادارهای پالس و رادارهای موج پیوسته است که قبلاً به دلیل پیچیدگی مدار های الکترونیکی از یکدیگر جدا بودند.
_7p1t.gif)
سیستم های راداری داپلر با طراحی خود می توانند اطلاعاتی راجع به حرکت اهداف و همچنین موقعیت آنها ارائه دهند. وقتی پالس امواج رادیویی را منتقل می کند ، سیستم فاز (شکل ، موقعیت و فرم) آن پالس ها را ردیابی می کند.رادار های داپلر برای شناسایی اهداف متحرکی که سطح اکو رادار آنها بسیار کوچکتر از بازگشت شلوغی زمین است استفاده می شوند. اهداف متحرک با استفاده از پدیده داپلر از شلوغی به صورت فراوانی جدا می شوند. رادار های داپلر با موج پیوسته دارای یک قابلیت عملیاتی حداکثر دامنه هستند زیرا نشتی بین فرستنده و گیرنده باعث اشباع گیرنده می شود. این محدودیت در رادار پالس-داپلر با تقسیم زمان در چرخه های انتقال و دریافت برطرف می شود.
رادار های داپلر برای شناسایی اهداف متحرکی که سطح اکو رادار آنها بسیار کوچکتر از بازگشت شلوغی زمین است استفاده می شوند. اهداف متحرک با استفاده از پدیده داپلر از شلوغی به صورت فراوانی جدا می شوند. رادار های داپلر با موج پیوسته دارای یک قابلیت عملیاتی حداکثر دامنه هستند زیرا نشتی بین فرستنده و گیرنده باعث اشباع گیرنده می شود. این محدودیت در رادار پالس-داپلر با تقسیم زمان در چرخه های انتقال و دریافت برطرف می شود.پردازش سیگنال های راداری پالس داپلر معمولاً به عنوان دنباله ای از مراحل شناخته می شود که به عنوان زنجیره پردازش شناخته می شوند. پردازش سیگنال برای افزایش نسبت سیگنال به نویز و برای افزایش عملکرد تشخیص ، ایجاد تمایز بین اهداف واقعی و تداخل ، درهم ریختگی یا مسدود کردن و استخراج اطلاعات مورد نظر در مورد اهداف که حداقل شامل آنها است ، اعمال می شود. دامنه و سرعت هدف. در حالی که نظم و عملیات دقیق پردازش از رادار به رادار دیگر متفاوت است.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار (پالس دوپلر) Pulse doppler ساختار ، عملکرد و کاربرد ها (علوم مخابرات)
نویسنده: افشین رشید
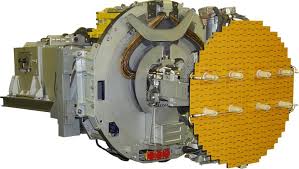
نکته: رادار های داپلر برای شناسایی اهداف متحرکی که سطح اکو رادار آنها بسیار کوچکتر از بازگشت شلوغی زمین است استفاده می شوند. اهداف متحرک با استفاده از پدیده داپلر از شلوغی به صورت فراوانی جدا می شوند. رادار های داپلر با موج پیوسته دارای یک قابلیت عملیاتی حداکثر دامنه هستند زیرا نشتی بین فرستنده و گیرنده باعث اشباع گیرنده می شود. این محدودیت در رادار پالس-داپلر با تقسیم زمان در چرخه های انتقال و دریافت برطرف می شود.
پردازش سیگنال های راداری پالس داپلر معمولاً به عنوان دنباله ای از مراحل شناخته می شود که به عنوان زنجیره پردازش شناخته می شوند. پردازش سیگنال برای افزایش نسبت سیگنال به نویز و برای افزایش عملکرد تشخیص ، ایجاد تمایز بین اهداف واقعی و تداخل ، درهم ریختگی یا مسدود کردن و استخراج اطلاعات مورد نظر در مورد اهداف که حداقل شامل آنها است ، اعمال می شود. دامنه و سرعت هدف. در حالی که نظم و عملیات دقیق پردازش از رادار به رادار دیگر متفاوت است.

سیستم های راداری داپلر با طراحی خود می توانند اطلاعاتی راجع به حرکت اهداف و همچنین موقعیت آنها ارائه دهند. وقتی پالس امواج رادیویی را منتقل می کند ، سیستم فاز (شکل ، موقعیت و فرم) آن پالس ها را ردیابی می کند.رادار های داپلر برای شناسایی اهداف متحرکی که سطح اکو رادار آنها بسیار کوچکتر از بازگشت شلوغی زمین است استفاده می شوند. اهداف متحرک با استفاده از پدیده داپلر از شلوغی به صورت فراوانی جدا می شوند. رادار های داپلر با موج پیوسته دارای یک قابلیت عملیاتی حداکثر دامنه هستند زیرا نشتی بین فرستنده و گیرنده باعث اشباع گیرنده می شود. این محدودیت در رادار پالس-داپلر با تقسیم زمان در چرخه های انتقال و دریافت برطرف می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار هواشناسی یا (Meteorological radar) (علومِ مخابرات)
نویسنده: افشین رشید
_2a0.jpg)
نکته: رادار های هواشناسی توانایی شناسایی حرکت قطره های باران و شدت بارش را دارند. هر دو نوع این اطلاعات می تواند برای تعیین ساختار طوفان و پتانسیل آن برای ایجاد هوای بد تحلیل شود.
با اندازه گیری شیفت (یا تغییر) فاز بین یک پالس منتقل شده و یک پژواک دریافتی ، حرکت هدف مستقیماً به سمت یا دور شدن از رادار محاسبه می شود. سپس این یک سرعت را در امتداد جهتی که رادار نشان می دهد ، فراهم می کند که سرعت شعاعی نامیده می شود. تغییر فاز مثبت به معنای حرکت به سمت رادار و تغییر منفی نشان دهنده حرکت به دور از رادار است.اصول رادارها این است که پرتویی از انرژی به نام امواج رادیویی از آنتن ساطع می شود. هنگامی که آنها به اشیا objects موجود در جو برخورد می کنند ، انرژی در همه جهات پراکنده می شود و مقداری از انرژی مستقیماً به سمت رادار منعکس می شود.هرچه جسم بزرگتر باشد ، میزان انرژی برگشتی به رادار نیز بیشتر خواهد بود. این توانایی را برای ما فراهم می کند تا قطرات باران را در جو مشاهده کنیم. علاوه بر این ، مدت زمانی که پرتوی انرژی برای انتقال و بازگشت به رادار نیز نیاز دارد ، با فاصله تا آن جسم است.اثر تغییر فاز مشابه "تغییر داپلر" است که با امواج صوتی مشاهده می شود. با "تغییر داپلر" ، به دلیل فشرده سازی (تغییر فاز) امواج صوتی ، صدای صوتی جسمی که به سمت مکان شما حرکت می کند بیشتر است . هنگامی که یک شی از مکان شما دور می شود ، امواج صوتی کشیده می شوند و در نتیجه فرکانس کمتری ایجاد می کنند.احتمالاً این اثر را از وسیله نقلیه یا قطار اضطراری شنیده اید. هنگامی که وسیله نقلیه یا قطار از مکان شما عبور می کند ، آژیر یا سوت هنگام عبور جسم پایین می آید.پالس های رادار داپلر به طور متوسط حدود 450000 وات قدرت انتقال دارند.
_nv9k.gif)
علاوه بر این ، رادار هواشناسی یا Meteorological radar از دو قطبی شدن نبض رادار (گیرنده _ فرستنده) استفاده میکند.رادار هواشناسی یا Meteorological radar به پیش بینی کنندگان شرایط آب و هوایی کمک می کند تا باران ، تگرگ ، برف ، خط باران / برف و گلوله های یخی را برای پیش بینی انواع آب و هوا شناسایی کنند.یکی دیگر از مزایای مهم رادار هواشناسی یا Meteorological radar با وضوح بیشتری بقایای گردباد موجود در هوا (توپ آوار) را تشخیص می دهد - به پیش بینی کنندگان اجازه می دهد تا تأیید کنند که گردباد روی زمین است و باعث آسیب می شود تا بتوانند با اطمینان بیشتری به جوامع موجود در این مسیر هشدار دهند. این امر مخصوصاً در شب هنگامی که لکه های زمینی قادر به دیدن گردباد نیستند بسیار مفید است.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار هواشناسی یا Meteorological radar از خانواده (پالس دوپلر) Pulse doppler ساختار ، عملکرد و کاربرد ها (علوم مخابرات)
نویسنده: افشین رشید
نکته : سیستم های راداری داپلر با طراحی خود می توانند اطلاعاتی راجع به حرکت اهداف و همچنین موقعیت آنها ارائه دهند. وقتی پالس امواج رادیویی را منتقل می کند ، سیستم فاز (شکل ، موقعیت و فرم) آن پالس ها را ردیابی می کند . رادار های هواشناسی توانایی شناسایی حرکت قطره های باران و شدت بارش را دارند. هر دو نوع این اطلاعات می تواند برای تعیین ساختار طوفان و پتانسیل آن برای ایجاد هوای بد تحلیل شود.
با اندازه گیری شیفت (یا تغییر) فاز بین یک پالس منتقل شده و یک پژواک دریافتی ، حرکت هدف مستقیماً به سمت یا دور شدن از رادار محاسبه می شود. سپس این یک سرعت را در امتداد جهتی که رادار نشان می دهد ، فراهم می کند که سرعت شعاعی نامیده می شود. تغییر فاز مثبت به معنای حرکت به سمت رادار و تغییر منفی نشان دهنده حرکت به دور از رادار است.
اصول رادارها این است که پرتویی از انرژی به نام امواج رادیویی از آنتن ساطع می شود. هنگامی که آنها به اشیا objects موجود در جو برخورد می کنند ، انرژی در همه جهات پراکنده می شود و مقداری از انرژی مستقیماً به سمت رادار منعکس می شود.هرچه جسم بزرگتر باشد ، میزان انرژی برگشتی به رادار نیز بیشتر خواهد بود. این توانایی را برای ما فراهم می کند تا قطرات باران را در جو مشاهده کنیم. علاوه بر این ، مدت زمانی که پرتوی انرژی برای انتقال و بازگشت به رادار نیز نیاز دارد ، با فاصله تا آن جسم است.اثر تغییر فاز مشابه "تغییر داپلر" است که با امواج صوتی مشاهده می شود. با "تغییر داپلر" ، به دلیل فشرده سازی (تغییر فاز) امواج صوتی ، صدای صوتی جسمی که به سمت مکان شما حرکت می کند بیشتر است . هنگامی که یک شی از مکان شما دور می شود ، امواج صوتی کشیده می شوند و در نتیجه فرکانس کمتری ایجاد می کنند.احتمالاً این اثر را از وسیله نقلیه یا قطار اضطراری شنیده اید. هنگامی که وسیله نقلیه یا قطار از مکان شما عبور می کند ، آژیر یا سوت هنگام عبور جسم پایین می آید.پالس های رادار داپلر به طور متوسط حدود 450000 وات قدرت انتقال دارند.
علاوه بر این ، رادار هواشناسی یا Meteorological radar از دو قطبی شدن نبض رادار (گیرنده _ فرستنده) استفاده میکند.رادار هواشناسی یا Meteorological radar به پیش بینی کنندگان شرایط آب و هوایی کمک می کند تا باران ، تگرگ ، برف ، خط باران / برف و گلوله های یخی را برای پیش بینی انواع آب و هوا شناسایی کنند.یکی دیگر از مزایای مهم رادار هواشناسی یا Meteorological radar با وضوح بیشتری بقایای گردباد موجود در هوا (توپ آوار) را تشخیص می دهد - به پیش بینی کنندگان اجازه می دهد تا تأیید کنند که گردباد روی زمین است و باعث آسیب می شود تا بتوانند با اطمینان بیشتری به جوامع موجود در این مسیر هشدار دهند. این امر مخصوصاً در شب هنگامی که لکه های زمینی قادر به دیدن گردباد نیستند بسیار مفید است.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات) رادارهای (Multistatic) ساختار ، عملکرد
نویسنده: افشین رشید
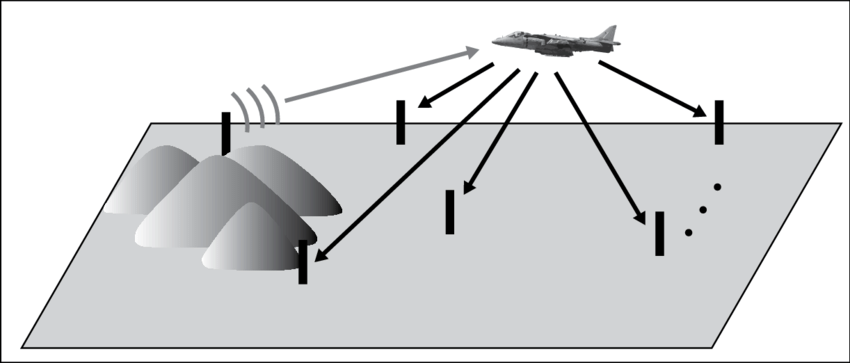
نکته : یک سیستم راداری Multistatic یک سیستم راداری Multistatic شامل چندین رادار متنوع فضایی متنوع یا رادار bistatic با یک منطقه تحت پوشش مشترک است. یک سیستم مُتمایز مهم بر اساس هندسه های راداری منفرد میباشد.
رادار چند استاتیک مزایای بسیاری نسبت به رادار تک استاتیک معمولی فراهم می کند ، مانند افزایش اطلاعات در مورد مشخصات هدف و بهبود در تشخیص که به دلیل دیدگاه های متعدد و تفاوت در خصوصیات شلوغی است. به علاوه ، این واقعیت که منفعل بودن گره های چند مرحله ای فقط دریافت هستند ، می تواند یک مزیت در کاربرد های نظامی باشد. به منظور تعیین کمیت مزایای عملکرد بالقوه این مزایا ، درک جامعی از رفتار هدف و بی نظمی در حالات چند مرحله ای لازم است. با این حال ، اندازه گیری های بیستاتیک و چند استاتیک به سختی انجام می شوند ، نتایج آنها به متغیر های زیادی مانند هندسه چند استاتیکی ، فرکانس ، قطبش و بسیاری دیگر بستگی دارد.
یک سیستم راداری Multi static اساسی از چندین فرستنده ، سوئیچ ، آنتن ، گیرنده و یک صفحه نمایش خروجی تشکیل شده است. همه چیز با تعدادی فرستنده شروع می شود زیرا یک پالس انرژی بالا را از طریق آنتن ارسال می کند. پس از انتقال کامل سوئیچ کنترل به گیرنده و آنتن آماده دریافت می شود. پس از دریافت سیگنال ، کنترل دوباره به فرستنده بازمی گردد. سوئیچینگ بین فرستنده و گیرنده تا 1000 برابر در ثانیه اتفاق می افتد.رادار هایی که چند فرستنده و گیرنده در مکان های مختلف قرار دارند را Multistatic نام گذاری میشود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات) رادار آرایه فازی (Phase Array) ساختار ، عملکرد
نویسنده: افشین رشید

نکته : به طور خلاصه در رادار آرایه فازی (Phase Array) تعدادی آنتن، سیگنالهای با فاز متفاوت از یکدیگر تولید میکنند که این امر سبب تقویت سیگنال در جهت دلخواه و تضعیف آن در جهت های نامناسب می شود. لذا به کمک این رادار ها می توان بدون نیاز به حرکت دادن مکانیکی جهت لوب اصلی آنتن را تغییر داد.
علاوه بر این با توجه به تعدد آرایه های ارسال، دریافت می توان هر تعداد از آرایه های یک آنتن را برای کار خاصی اختصاص داد. یک رادار معمولی با چرخش فیزیکی پرتوی اصلی خود به صورت 360 درجه و سپس اندازه گیری اینکه چگونه بازتابنده ها - از طریق افزایش و قدرت بازخورد امواج برگشتی ، مشخصات اهداف را ردیابی می کند. اما آرایه فازی (Phase Array) مرحله ای متفاوت عمل می کنند. آنها با دستکاری الگویی که از آرایه ای متشکل از صدها یا هزاران عنصر تابش گرفته شده ، پرتو اصلی را هدایت می کنند ، تقریباً بلافاصله مکان امواج همپوشان را بجای یک ظرف واقعی حرکت می دهند.
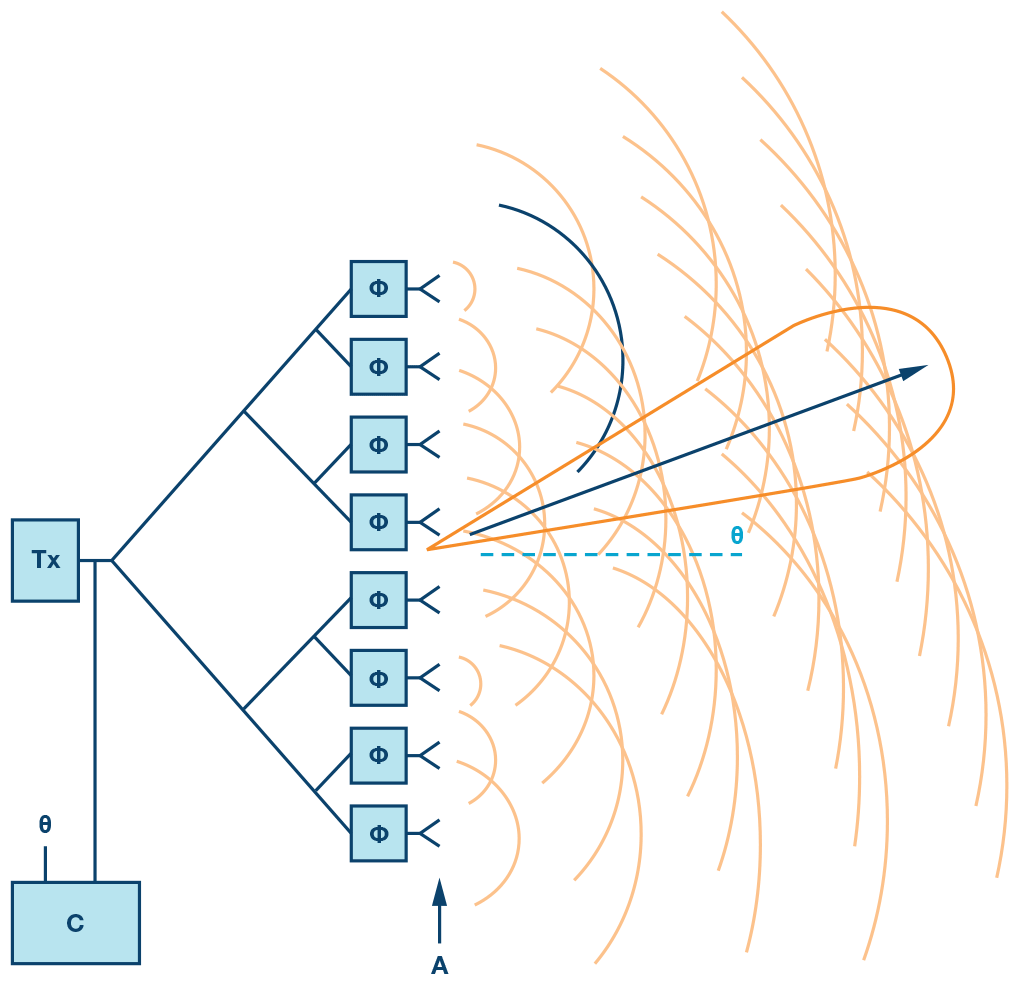
دو گونهی اصلی رادار های آرایه فازی عبارت اند از:
1- غیرفعال: در این نوع رادار ها تغذیه ی کلیه ی آنتن ها توسط یک منبع مولد واحد صورت می گیرد و به کمک شیفت دهنده ای فاز می توان فاز خروجی هر آرایه را تغییر داد. در این نوع آنتن تنها یک پرتو اصلی می توان تولید کرد.
2- فعال: در این نوع رادار ها هر آرایه مولد مستقلی دارد، لذا کنترل بیشتری بر روی آرایه ها وجود داشته و امکان تولید چندین پرتو اصلی وجود دارد. لازم به ذکر است قیمت تمام شده ی این نوع آنتن به علت پیچیدگی های فراوان بیش از نوع غیر فعال است.
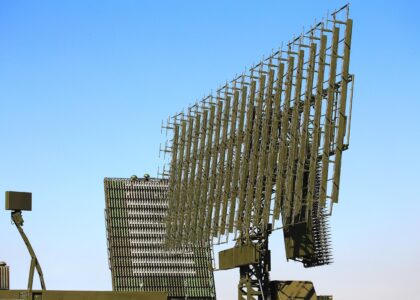
همانطور که در ساختار آنتن آرایه فازی امواج تولیدی مولد ابتدا وارد شیفت دهنده شده سپس به تعدادی آرایه ارسال دریافت وارد می شود. با کنترل شیفت دهندی فاز می توان پرتو دلخواه را تولید کرد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات) رادار های مونو استاتیک Monostatic و بی_استاتیک Bistatic (ساختار و عملکرد)
نویسنده: افشین رشید
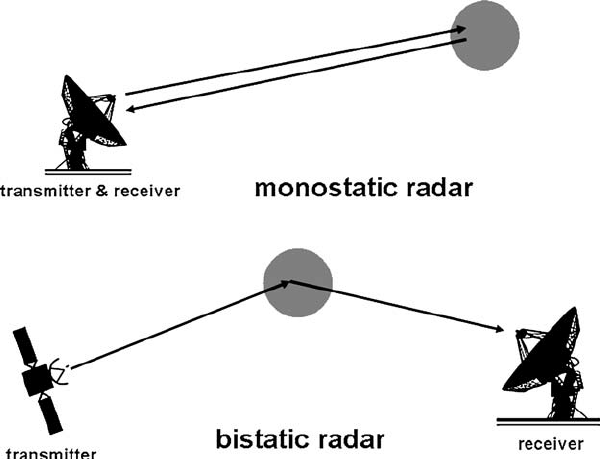
نکته : رادار های مونواستاتیک Monostatic رادار هایی که فرستنده و گیرنده ی آنها در یک نقطه واقع است را مونواستاتیک می نامیم. در واقع فاصله ی بین گیرنده و فرستنده در این رادار ها بسیار کوچکتر از فاصله نقطهی استقرار رادار نسبت به هدف است لذا فرستنده و گیرنده یک فضای یکسان را پوشش می دهند.
در اغلب موارد فرستنده و گیرنده ی رادار مونواستاتیک در یک سامانه تعبیه شده و از یک آنتن استفاده می کنند. جداسازی دو مُود کاری گیرندگی و فرستندگی در این رادار هایی که از یک آنتن گیرنده فرستنده استفاده می کنند توسط واحدی به نام سلول گیرنده/فرستنده یاT/cellیا داپلکسرDuplexer صورت میگیرد. این سلول وظیفه دارد در حالت فرستندگی ورودی گیرنده را بلوکه کند. در این رادار ها به کمک اندازه گیری زمان رفت و برگشت سیگنال و ضرب آن در سرعت حرکت موج (سرعت نور) فاصله هدف استخراج می شود. همچنین سرعت هدف را می توان به کمک خاصیت شیفت داپلر فرکانس اکو هدف محرک تشخیص داد.
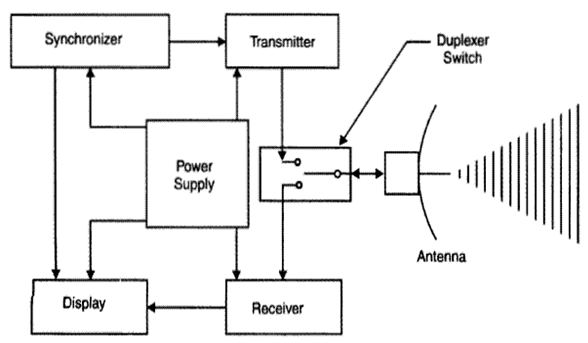
رادار جستجو و نظارت هوایی مونواستاتیک با برد نسبتاً بالا و دو بعدی و همچنین با برد در حدود 300 کیلومتر و سه بعدی و نمونه ای با قابلیت مقابله با جنگ الکترونیک تا 360 کیلومتر و انواعی از رادار های پَسیو است. فرکانس هایی که در دسته وی-اچ-اف VHF قرار می گیرند از قابلیت بالایی در کشف اهداف پنهان کار برخوردارند .گفتنی است رادار هایی که در آن فرستنده و گیرنده یکی هستند مونواستاتیک، آنهایی که فرستنده و گیرنده در دو نقطه متفاوت و فاصله دار هستند بایاستاتیک و مجموعه هایی با چند گیرنده و چند فرستنده جدا از هم مولتی استاتیک گفته می شود.گفتنی است یکی از روش های پنهان کاری رادار استفاده از سطوح زاویه دار یا منحنی در بدنه هواگرد به طوری است که بازتابش امواج به محل فرستنده برنگردد. با استفاده از رادار هایی با فرستنده و گیرنده فاصله دار که در محل های متفاوتی نصب شده اند، بازتاب های حاصله از هواگرد رادار گریز توسط گیرنده ای دیگر دریافت شده و در نتیجه هدف کشف می شود.
بی_ستاتیک Bistatic رادار Radar
رادار بیستاتیک یک سیستم راداری متشکل از یک فرستنده و گیرنده است که با مسافت قابل مقایسه با فاصله مورد انتظار از هم جدا می شوند. برعکس ، یک رادار که در آن فرستنده و گیرنده قرار گرفته اند ، یک رادار تک استاتیک نامیده می شود . به سیستمی که شامل چندین رادار تک استاتیک یا از یک رادار بای استاتیک با یک منطقه تحت پوشش مشترک باشد ، رادار چند استاتیک گفته می شود . بسیاری از سامانه های دفاعی از رادار نیمه فعال که نوعی رادار بیستاتیک است استفاده می کنند.بعضی از سیستم های راداری ممکن است آنتن های جداگانه ای برای ارسال و دریافت داشته باشند ، اما اگر زاویه بین فرستنده ، هدف و گیرنده (زاویه بیستاتیک) فراتر از صفر باشد ، آنها هنوز هم به عنوان تک استاتیک یا شبه یکنواخت در نظر گرفته می شوند . به عنوان مثال ، برخی از سیستم های راداری HF با برد بسیار طولانی ممکن است یک فرستنده و گیرنده داشته باشند که برای انزوای الکتریکی با چند ده کیلومتر از هم جدا شده اند ، اما از آنجا که دامنه هدف مورد نظر از 1000-3500 کیلومتر است ، آنها در نظر گرفته نمی شوند واقعاً بیستاتیک است و به عنوان شبه monostatic شناخته می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی مزایا و معایب رادیوهای دریایی VHF (علوم مخابرات)
رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپرکانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است .استفاده های معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند.
این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی سیستم ناوبری استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده ازخاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.
رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپر کانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است.استفادههای معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بلوک های تشکیل دهنده یا (Block diagram) رادار (تپی) Pulsed Radar
نویسنده : افشین رشید
نکته : رادار های پالسی Pulsed (تپی) راداری است که ابتدا یک پالس ارسال می کند و سپس منتظر رسیدن اکو اهداف می ماند. این امر مانع از تداخل بین گیرندگی و فرستندگی میشود و امکان استفاده از یک آنتن واحد به عنوان گیرنده و فرستنده را فراهم می آورد. با اندازه گیری زمان بین ارسال و دریافت می توان برد هدف را بدست آورد.
رادار پالسی Pulsed Radar به روشی بسیار ساده کار می کند. امواج الکترومغناطیسی ، مانند امواج رادیویی یا مایکروویو ، توسط یک فرستنده با سرعت نور (2.93 X 10 8 m / s) ارسال می شوند ، از اشیا پرش می کنند و به گیرنده منعکس می شوند. امواج الکترومغناطیسی برخلاف امواج صوتی می توانند انرژی را از طریق خلا منتقل کنند. به همین دلیل از امواج الکترومغناطیسی برای ارتباط با ماهواره ها در فضای عمیق استفاده می شود.یک سیستم راداری اساسی از یک فرستنده ، سوئیچ ، آنتن ، گیرنده و یک صفحه نمایش خروجی تشکیل شده است. همه چیز با فرستنده شروع می شود زیرا یک پالس انرژی بالا را از طریق آنتن ارسال می کند. پس از انتقال کامل سوئیچ کنترل به گیرنده و آنتن آماده دریافت می شود. پس از دریافت سیگنال ، کنترل دوباره به فرستنده باز می گردد. سوئیچینگ بین فرستنده و گیرنده تا 1000 برابر در ثانیه اتفاق می افتد.اطلاعات مفید را می توان از داده های به دست آمده از سیگنال برگشتی محاسبه کرد. سیگنال برای قدرت ، زمان صرف شده برای بازگشت و فرکانس آن تجزیه و تحلیل می شود. از این اطلاعات می توانیم سرعت ، فاصله ، جهت هدف را تعیین کرده و حتی یک تصویر ایجاد کنیم.اگر چه سرعت سیگنال منعکس نشده تغییر می کند ، اما فرکانس بسته به سرعت هدف تغییر می کند. این به عنوان اثر داپلر شناخته می شود. هر چه هدف با سرعت بیشتری حرکت کند ، فرکانس سیگنال برگشتی نیز بالاتر می رود.
_kcox.jpg)
Pulse modulator : تعدیل کننده پالس - سیگنال مدولاسیون شده با پالس تولید می کند و به فرستنده اعمال می شود.
Transmitter فرستنده - سیگنال مدولاسیون شده با پالس را که قطاری از پالس های تکراری است ، منتقل می کند.
Duplexer - این یک سوئیچ مایکروویو است که آنتن را به طور متناوب به بخش فرستنده و گیرنده متصل می کند. هنگامی که دوبلکسر آنتن را به فرستنده متصل می کند ، آنتن سیگنال تعدیل شده پالس را انتقال می دهد. هنگامی که دوبلکسر آنتن را به تقویت کننده کم صدا RF متصل می کند ، به همین ترتیب ، سیگنالی که توسط آنتن دریافت می شود به تقویت کننده RF کم سر و صدا داده می شود.
Low Noise RF Amplifier تقویت کننده RF کم سر و صدا - این سیگنال ضعیف RF را که توسط آنتن دریافت می شود ، تقویت می کند. خروجی این آمپلی فایر به میکسر متصل است.
Local Oscillator نوسان ساز محلی - سیگنالی با فرکانس پایدار تولید می کند. خروجی نوسان ساز محلی به میکسر متصل است.
Mixer میکسر - می دانیم که میکسر می تواند مجموع و تفاوت فرکانس های اعمال شده روی آن را تولید کند. از این میان ، تفاوت فرکانس ها از نوع فرکانس متوسط (IF) خواهد بود.
IF Amplifier تقویت کننده IF - تقویت کننده IF سیگنال فرکانس متوسط (IF) را تقویت می کند. آمپلی فایر IF که در شکل نشان داده شده است فقط فرکانس متوسط را می دهد که از میکسر به دست می آید و آن را تقویت می کند. باعث بهبود نسبت سیگنال به نویز در خروجی می شود.
Detector ردیاب - سیگنال را که در خروجی IF Amplifier بدست می آید از بین می برد.
Video Amplifier تقویت کننده تصویری - همانطور که از نامش پیداست ، سیگنال تصویری را که در خروجی ردیاب بدست می آید ، تقویت می کند.
Display صفحه نمایش - به طور کلی ، سیگنال ویدئویی تقویت شده را بر روی صفحه CRT نمایش می دهد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار (تَپی) Pulsed Radar ساختار و عملکرد
نویسنده : افشین رشید

نکته : راداری که با استفاده از سیگنال پالس برای شناسایی اهداف ثابت کار می کند ، اصطلاح اساسی پالس رادار یا به سادگی ، رادار پالس نامیده می شود . رادار پالس از آنتن منفرد برای انتقال و دریافت سیگنال ها با کمک Duplexer استفاده می کند.
رادار (تَپی) Pulsed Radar پالس های کوتاه و قدرتمندی ساطع می کند و در دوره خاموش سیگنال های اکو را دریافت می کند. در مقابل رادار موج پیوسته ، فرستنده قبل از پایان اندازه گیری خاموش می شود. این روش با مدولاسیون پالس رادار با پالس های انتقال بسیار کوتاه مشخص می شود (به طور معمول مدت زمان پالس 1 میکرو ثانیه را انتقال می دهد ). بین پالس های انتقال دهنده مکث های پالس بسیار بزرگ وجود دارد که به عنوان زمان دریافت (به طور معمول 1 میلی ثانیه ) شناخته می شود. فاصله اجسام بازتابنده با اندازه گیری زمان اجرا (در یک ثابت رادار) یا با مقایسه تغییرات مشخصه طیف داپلر با مقادیر مربوط به فواصل معین ذخیره شده در یک پایگاه داده (برای رادار در یک سکوی سریع حرکت). رادارهای پالس بیشتر برای مسافت های طولانی طراحی شده اند و قدرت پالس نسبتاً بالایی را منتقل می کنند.وجه تمایز مهم نسبت به روش دیگر رادار ، کنترل زمان لازم کلیه فرایندهای داخل رادار پالس است. لبه جلوی نبض منتقل شده مرجع زمان برای اندازه گیری زمان اجرا است. با انتقال لبه در حال افزایش سیگنال اکو در بالای پالس به پایان می رسد. تأخیرهای سیستماتیک در پردازش سیگنال باید هنگام محاسبه فاصله اصلاح شود. انحرافات تصادفی بر دقت رادار پالس تأثیر می گذارد .
_y8sk.gif)
رادار های پالسی Pulsed (تپی) راداری است که ابتدا یک پالس ارسال می کند و سپس منتظر رسیدن اکو اهداف می ماند. این امر مانع از تداخل بین گیرندگی و فرستندگی میشود و امکان استفاده از یک آنتن واحد به عنوان گیرنده و فرستنده را فراهم میآورد. با اندازهگیری زمان بین ارسال و دریافت می توان برد هدف را بدست آورد (در رادار های مونواستاتیک) به این صورت میباشد.حال اگر یک رادار پالسی (تپی) از خاصیت شیفت داپلر جهت استخراج سرعت هدف استفاده کند به آن رادار پالس داپلری می گوییم.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات) آنتن سَهموی(ParabolicAntenna) در سیستم موقعیت رادیویی (رادار) در باندهای UHF و SHF
نویسنده : افشین رشید
_8x1.jpeg)
نکته :آنتن سَهموی (Parabolic Antenna) آنتنی بازتابنده با بهرهٔ بالا است که برای ارتباطات دادهای و همچنین سیستم موقعیت رادیویی (رادار) در باندهای UHF و SHF طیف الکترومغناطیسی به کار می رود. طول موج نسبتاً کوتاه تشعشع الکترومغناطیسی در این فرکانس ها اجازه می دهد تا بازتاب کننده ها، امواج را به طور جهت دار ارسال یا دریافت کنند.
آنتن سَهموی (Parabolic Antenna) نوعی از آنتن های گیرنده است که با استفاده از یک سطح بازتابنده یا پارابولیک برای هدایت امواج رادیویی و فرکانسهای مخابراتی استفاده میشود.قدرت آنتن پارابولیک در رادار ها برای اکتشاف ریز پرنده ها مانند پهباد بسیار بالا است.این نوع از آنتن گیرنده در مخابرات یکی از بهترین انخابها برای مناطقی است که نویز بالا دارند و سطح سیگنال دریافتی بسیار پایین است .آنتن سَهموی (Parabolic Antenna) در اصل کار عدسی را در رادار انجام میدهند ، هر آنتن پارابولیک یک واحد دریافت کننده در فاصله کانونی خود قرار دارد ، سیگنال دریافتی توسط گرید یا صفحه آنتن به واحد دریافت کننده میفرستد . اما دلیل اینکه دارای بشقاب توری مانند هستند ، برای عبور جریان هوا است تا لرزش آنتن کم بشود ،هم به صورت عمودی و هم افقی مورد استفاده قرار میگیرند.
مزیت اصلی آنتن های رفلکتوری پارابولیک در رادار داشتن دایرکتیویته و در نتیجه گین بالاست که استفاده آنها را در رنج وسیعی از باند مایکروویو جهت انتقال دیجیتال و آنالوگ اطلاعات، ضروری نموده است. این کاربردها شامل انتقال رادیویی نقطه به نقطه (Line of Site)، ایستگاه های زمینی راداری، کاربرد های ردیابی، رادار کشف ریز پرنده (پهباد) ، اهداف نظامی و ... می باشد.هر دو گونه آنتن سَهموی (Parabolic Antenna) یعنی دو رفلکتوری و تک رفلکتومی بسته به چگونگی سیستم تغذیه (Feeding) به دو نوع تغذیه متقارن یا هم محور (front-fed) و نامتقارن تقسیم می شوند.هر کدام از آنتن های فوق دارای مزایا و معایب ویژه ای است که ضرورت استفاده آنها را در کاربرد خاصی معینی می نماید. آنتن های غیر هم محور اثر سد دهانه (aperture blocking) را کاهش داده ولی در عوض دریافت پلاریزاسیون ناخواسته (XPOL) را افزایش می دهد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات ) جَمینگ نویزی و تخریب یا فریب رادارهای جستجو (بمباران نویزی) ساختار و عملکرد
نویسنده: افشین رشید
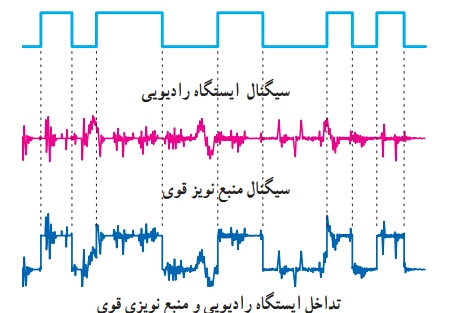
نکته : از آنجایی که سیگنال های راداری اطلاعات نیستند، شنود آنها در حقیقت به منزله بهره برداری از آنها به منظور آشکار سازی و تشخیص نوع سیگنال برای تخریب یا فریب رادار می باشد.
برای یک فرستنده ECM تولید سیگنالی با سطح توان بسیار بالاتر از سطح سیگنال های بازگشتی، هنگامی که وارد گیرنده راداری می شوند، به تنهایی کفایت نمی کند. در بسیاری از موارد نیازمند مدولاسیون های اضافی بر روی سیگنال فرستاده شده، به منظور مختل کردن اندازهگیری پارامتر های موقعیت در گیرنده رادار است. روش اصلی اختلال، قرار دادن یک سیگنال تداخل در کنار سیگنال مطلوب برای گیرنده رادار است. اگر چه استفاده از جمینگ های نویز عمدتا در مقابله با رادار های جستجو می باشد.رادار ها در طیف فرکانس های فرستنده فعالیت میکنند که هر کدام تفاوت فیزیکی خود را دارند. هر چه فرکانس رادار افزایش یابد موج ارسالی بیشتر تحت تاثیر عوامل جوی همچون ابر و باران قرار میگیرند اما هرچه فرکانس بالاتر میرود ، فرکانس بازگشت نیز قوی تر میشود و این به معنای دقت بیشتر است. رادار جستجو و یا هشدار یعنی راداری که برای کشف هدف و رصد آسمان استفاده می شود رادار درگیری یعنی رادار که دقت کافی برای قفل روی هدف و هدایت سلاح را دارد. برخی رادار ها هر دو توان را دارند.
_gpoy.gif)
اولین قدم در بسیاری از الگوریتم های پردازش راداری، حذف نویز از تصاویر رادار می باشد، چرا که بدون حذف نویز این الگوریتم ها نتایج خوبی تولید نمی کنند. برای مثال نویز نقطه ای که به مانند لکه های سیاه یا روشن روی تصاویر رادار میباشد، یکی از انواع شایع نویزها میباشد. این نویز در گیرنده رادار باقی مانده و موجب پنهان کردن تصاویر و اهداف از دید رادار می گردد. این نویز از نوع پنهان بوده و معمولاً با استفاده از نوعی سر و صدا به عنوان سیگنال ECM به نام " سر و صدا " یا " پارازیت سر و صدا " پنهان شده و انتقال پیدا خواهد کرد این تکنیک اختلال می تواند بر علیه رادار های جستجو بکار رود تا برد قابلیت تشخیص هدف آن ها را خراب کند.خصوصیت این نوع اختلال این است که قدرت آن به صورت متمرکز است (از چند مگاهرتز تا ۱۰ مگاهرتز). از این اختلال برای مختل کردن رادار های خاص استفاده می شود.
پارازیت رگباری یا نویز رگباری یک نوع نویز متراکم است. این نویز متراکم به سادگی پهنای باند را باریک یا مسدود می کند و به همراه سر و صدا به اندازه پهنای باند در گیرنده رادار با قدرت زیادی برای مسدود کردن گیرنده راداری استفاده می شود. این نوع از پارازیت به وسیله سر و صدا از یک پهنای باند وسیعی برای پوشش چند رادار و مسدود کردن آنها در فرکانسهای مختلف و ایجاد اعوجاج در هر فرکانس، مورد استفاده قرار می گیرد به طوری که یک فرکانس متراکم در یک گروه گسترده از فرکانس را به صورت رگباری جارو میکند و باعث اعوجاج خوردن فرکانس مورد نظر می شود.در حالت کلی جمر های فریب دهنده بایستی به دقت مشخصات یک هدف واقعی را برگردانند، تا در فریب رادار موفق شود. به عنوان مثال جمر های تکرار کننده، قابلیت شبیه سازی زیادی به هدف دارند و تکنیک EP یچیده ای در مقابله با آن ها نیاز است. تکنیک هایی که با استفاده از آن برخی ضعف های مدارات گیرنده رادار ردگیری قفل آن را می شکنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(رادار دهانه ترکیبی) Synthetic-aperture radar علوم مخابرات ؛ عملکرد و ساختار رادار (آرایه ترکیبی SAR)
نویسنده: افشین رشید
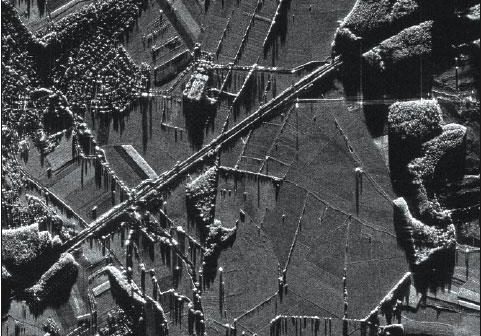
(رادار دهانه ترکیبی) Synthetic-aperture radar رادار روزنه مصنوعی و فناوری سار هم نامیده می شود با تکیه بر همان فناوری رادار در حال تصویر برداری است و نهایتاً یک تصویر دو بعدی تولید می کند(رادار دهانه ترکیبی) Synthetic-aperture radar برای تهیهی یک نقشه دقیق از زمین و عوارض موجود در آن لازم است از یک آنتن طویل استفاده کنیم اما امکان ساخت و بکارگیری راداری با آنتن بزرگ جهت دستیابی به رزولوشن بالا از عوارض زمینی امکانپذیر نیست. برای رفع این مشکل از تکنیک ردار دریچه مصنوعی یا SAR استفاده میشود. در این تکنیک هواگرد در حال حرکت اقدام به ارسال دریافت امواج کرده و بدین ترتیب یک آنتن طویل شبیه سازی می شود.رادار ها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند.
_hdnm.gif)
بر اساس یک تقسیم بندی کلاسیک، رادار های تصویرگر را میتوان به دو دسته بزرگ یعنی رادار های آرایه – حقیقی (RAR) و رادار های آرایه – ترکیبی (SAR) تقسیم بندی کرد که هر کدام ویژگی ها و اهمیت خاص خود را دارند. رادار های روزنه مصنوعی یا همان سار Synthetic Aperture Radar به نوعی از رادار ها اطلاق میشود که برای امور نقشه برداری و تصویر برداری از سطح زمین به کار می رود. معمولا این فن آوری در هواپیماهای شناسایی با اهداف نظامی و غیر نظامی کاربرد دارد.در این رادار ها موج ارسالی به صورت یک پالس با فرکانس مشخص به نام PRF(فرکانس تکرار پالس) می باشد. نسبت دوره تناوبPRT زمان تکرار پالس به عرض پالس را نسبت به زمان کار می گویند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادارهای پالسی Pulsed (تپی)مانع از تداخل بین گیرندگی و فرستندگی
نکته: دسته بندی انواع رادارها را میتوان بر اساس به سختافزار، نرمافزار، تکنیکهای پردازش سیگنال، نوع کارکرد، فرکانس کاری و... انجام داد.
رادارهای پالسی Pulsed (تپی)
رادار پالسی راداری است که ابتدا یک پالس ارسال میکند و سپس منتظر رسیدن اکو اهداف میماند. این امر مانع از تداخل بین گیرندگی و فرستندگی میشود و امکان استفاده از یک آنتن واحد به عنوان گیرنده و فرستنده را فراهم میآورد. با اندازهگیری زمان بین ارسال و دریافت میتوان برد هدف را بدست آورد (در رادارهای مونواستاتیک)
اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. پالسی نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
رادار پالسی Pulsed Radar به روشی بسیار ساده کار می کند. امواج الکترومغناطیسی ، مانند امواج رادیویی یا مایکروویو ، توسط یک فرستنده با سرعت نور (2.93 X 10 8 m / s) ارسال می شوند ، از اشیا پرش می کنند و به گیرنده منعکس می شوند. امواج الکترومغناطیسی برخلاف امواج صوتی می توانند انرژی را از طریق خلا منتقل کنند. به همین دلیل از امواج الکترومغناطیسی برای ارتباط با ماهواره ها در فضای عمیق استفاده می شود.یک سیستم راداری اساسی از یک فرستنده ، سوئیچ ، آنتن ، گیرنده و یک صفحه نمایش خروجی تشکیل شده است. همه چیز با فرستنده شروع می شود زیرا یک پالس انرژی بالا را از طریق آنتن ارسال می کند. پس از انتقال کامل سوئیچ کنترل به گیرنده و آنتن آماده دریافت می شود. پس از دریافت سیگنال ، کنترل دوباره به فرستنده باز می گردد. سوئیچینگ بین فرستنده و گیرنده تا 1000 برابر در ثانیه اتفاق می افتد.اطلاعات مفید را می توان از داده های به دست آمده از سیگنال برگشتی محاسبه کرد. سیگنال برای قدرت ، زمان صرف شده برای بازگشت و فرکانس آن تجزیه و تحلیل می شود. از این اطلاعات می توانیم سرعت ، فاصله ، جهت هدف را تعیین کرده و حتی یک تصویر ایجاد کنیم.اگر چه سرعت سیگنال منعکس نشده تغییر می کند ، اما فرکانس بسته به سرعت هدف تغییر می کند. این به عنوان اثر داپلر شناخته می شود. هر چه هدف با سرعت بیشتری حرکت کند ، فرکانس سیگنال برگشتی نیز بالاتر می رود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار های آرایه فاز الکترومغناطیسی phased array (ساختار و عملکرد) در (علوم مخابرات)
نویسنده: افشین رشید
در تئوری آنتن ، یک رادار آرایه فاز معمولاً به معنای یک آرایه اسکن شده الکترونیکی ، یک آرایه کنترل شده توسط کامپیوتر است که یک پرتوی امواج رادیویی ایجاد می کند که می تواند به صورت الکترونیکی هدایت شود تا در جهات مختلف بدون حرکت آنتن ها به آن اشاره کند. در رادار آرایه فاز phased array پرتوی امواج رادیویی که در یک جهت خاص حرکت می کنند. تغییر دهنده های فاز موج های رادیویی را که به تدریج از خط بالا می روند به تأخیر می اندازند بنابراین هر آنتن دیرتر از آن در زیر موج خود موج موج خود را ساطع می کند. این امر باعث می شود که موج هواپیمای حاصل در یک زاویه به محور آنتن هدایت شود. با تغییر، تغییر فاز ، کامپیوتر می تواند فوراً زاویه پرتو را تغییر دهد.در یک آنتن آرایه ، جریان فرکانس رادیویی از فرستنده با فاز صحیح به آنتن های فردی تغذیه می شود.به گونه ای که امواج رادیویی از آنتن های جداگانه به یکدیگر اضافه شده و تابش را در جهت دلخواه افزایش می دهند ، در حالی که برای سرکوب اشعه در جهت های ناخواسته لغو می شوند. در یک آرایه فاز ، نیرو از فرستنده از طریق دستگاههایی به نام شیفت فاز ، کنترل شده توسط یک سیستم رایانه ای ، به آنتن ها تغذیه می شود ، می تواند فاز را به صورت الکترونیکی تغییر دهد ، بنابراین پرتوی امواج رادیویی را به جهت دیگری هدایت می کند. از آنجایی که این آرایه برای دستیابی به دقت بالا باید از بسیاری از آنتن های کوچک (گاهی اوقات هزاران آنتن کوچکتر) تشکیل شود ، آرایه های مرحله ای عمدتاً در انتهای فرکانس بالا طیف رادیویی ، در باند UHF و ماکروویو کاربرد دارند . که در آن عناصر آنتن به راحتی کوچک هستند.
برای شناسایی هواپیماها و موشکها ، آرایه های مرحله ای برای استفاده در سیستم های راداری نظامی اختراع شد تا بتوانید پرتوی از امواج رادیویی را به سرعت در سراسر آسمان هدایت کنید. این سیستم ها اکنون به طور گسترده مورد استفاده قرار گرفته و در برنامه های غیر نظامی گسترش یافته است. از اصل آرایه فاز نیز در آکوستیک استفاده می شود و از آرایه های مرحله ای مبدل های آکوستیک در اسکنر ها و سیستم های سونار نظامی استفاده می شود. اصطلاح "آرایه فاز" نیز در حدی کمتر برای آنتن های آرایه ای بدون تحرک استفاده میشود.که در آن فاز قدرت تغذیه و در نتیجه الگوی تابش آرایه آنتن ثابت است. به عنوان مثال ، آنتن های رادیویی AM متشکل از رادیوهای مستر چند تغذیه شده برای ایجاد یک الگوی خاص تابش ، "آرایه های مرحله ای" نیز گفته می شود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
بررسی بیشتر قسمت های رادار نفوذ زمین GPR
نویسنده: افشین رشید
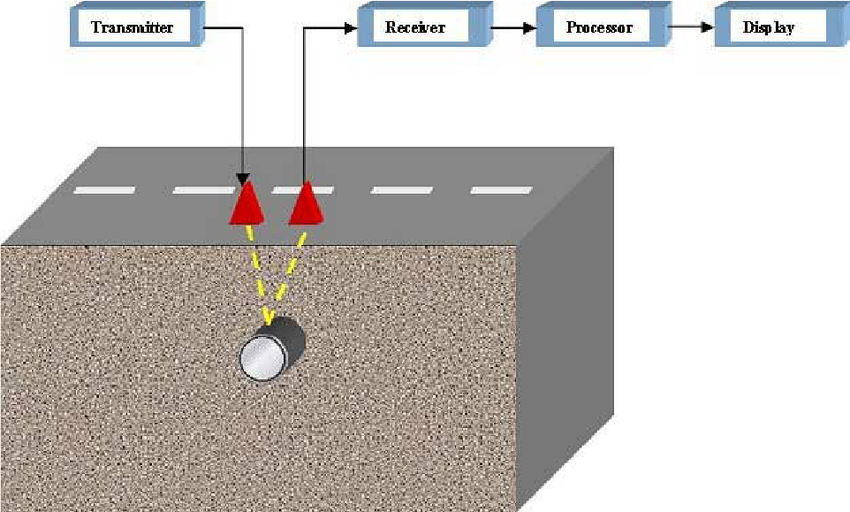
یک سیستم رادار نفوذ زمین GPR از سه مؤلفه اصلی تشکیل شده است.(واحد کنترل ، آنتن، منبع تغذیه) این رادار به صورت دستی و بیشتر برای اکتشاف به وسیله بازتاب امواج در عمق زمین کاربرد دارد.در ساختار اجزای تشکیل دهنده رادار نفوذ زمین GPR واحد کنترل شامل الکترونیکی است که پالس انرژی راداری را که آنتن به داخل زمین می فرستد ، تحریک می کند. همچنین دارای یک کامپیوتر داخلی و حافظه دیسک سخت / حالت جامد است که می تواند داده ها را برای بررسی بعد از کار میدانی ذخیره کند. برخی از سیستم ها ، با نرم افزار کنترل از پیش بارگذاری شده کنترل می شوند. این سیستم بدون نیاز به بارگیری فایل های رادار در رایانه دیگر ، به پردازش و تفسیر داده ها ی عمق زمین میپردازد .آنتن پالس الکتریکی تولید شده توسط واحد کنترل را دریافت می کند ، آن را تقویت می کند و آن را با فرکانس خاصی به داخل زمین یا رسانه دیگر منتقل می کند. فرکانس آنتن یکی از مهمترین عوامل نفوذ در عمق است. هرچه فرکانس آنتن بیشتر باشد ، کم عمق بیشتری به داخل آن می رود. آنتن فرکانس بالاتر نیز اهداف کوچکتر را "مشاهده" می کند. انتخاب آنتن در رادار GPR (نفوذ زمین) یکی از مهمترین عوامل در طراحی پیمایشی است. GPR با ارسال یک پالس انرژی کوچک به یک ماده و ثبت قدرت و زمان لازم برای بازگشت هر سیگنال منعکس شده کار می کند. مجموعه ای از پالس ها بر روی یک ناحیه واحد آنچه را اسکن می نامند تشکیل می دهند. بازتاب ها هر زمان که پالس انرژی به ماده ای با خصوصیات هدایت الکتریکی مختلف یا نفوذ دی الکتریک از موادی که در آن وارد شده است ، وارد می شود. قدرت یا دامنه بازتاب توسط کنتراست موجود در دی الکتریک و رسانایی دو ماده تعیین می شود.
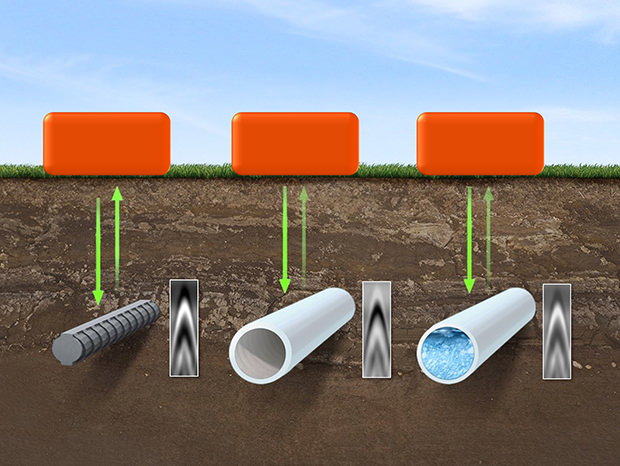
مواد با دی الکتریک بالا موج رادار را آهسته می کنند و تا آنجا قادر به نفوذ نخواهند بود. مواد با رسانش بالا سیگنال را به سرعت ضعیف می کنند. اشباع آب دی الکتریک ماده را به طرز چشمگیری بالا می برد ، بنابراین یک منطقه بررسی باید از نظر علائم نفوذ آب به دقت مورد بازرسی قرار گیرد.فلزات به عنوان یک بازتاب دهنده کامل در نظر گرفته می شوند و اجازه نمی دهند هر مقدار سیگنال از آن عبور کند. مواد زیر بشقاب فلزی ، مش فلزی ریز یا کف تابه قابل مشاهده نخواهد بود.انرژی رادار در یک خط مستقیم از آنتن ساطع نمی شود. در شکل مخروطی ساطع می شود. در حالی که برخی از پالس های انرژی GPR به آنتن منعکس شده است ، انرژی همچنان از طریق مواد تا زمانی که آن را از بین ببرد (کاهش می یابد) یا واحد کنترل GPR پنجره زمان خود را باز نگه می دارد ، ادامه می دهد. میزان میرایی سیگنال بسیار متفاوت است و به خواص ماده ای که پالس در آن عبور می کند بستگی دارد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(امواج کوتاه بُرد_ متوسط) (مخابرات _سونار) در اقیانوس و دریا
نکته: یکی از اولین چیزهایی که اکثر مردم در مورد (الکترونیک _ امواج ارتباطی ) دریایی فکر میکنند، VHF است.
سیستم مخابراتی باند VHF و (SSBـHF / MF) همچنین باید اولین موردی باشد که درهنگام نصب یا ارتقای سامانه های مخابراتی الکترونیکی در هر کشتی، و سیستم مخابراتی ناوبری به کار گرفته شود . با این حال، برای بسیاری از دریانوردان، نیازهای مخابرات دریایی خود را فراتر از محدوده VHF گسترش میدهند. برای این افراد، باید یک باند متوسط / بسامد متوسط (SSBـHF / MF) مورد توجه قرار گیرد.رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپرکانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است .استفاده های معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی سیستم ناوبری استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده ازخاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.رادیوهای دریایی VHF را برروی بیشتر از همه کشتیها در سراسر جهان پیدا خواهید کرد. از سوپر کانتینربرها تا قایق های ماهیگیری، بدون شک VHF دریایی توانمندترین سامانه ارتباطات دریایی است.استفادههای معمول از محدوده VHF شامل ارتباطات دفاعی و ایمنی، مشاوره های ناوبری دریایی،گزارشهای آب و هوایی پیش بینی شده، تماس با کشتیهای دیگر، اتصال به سیستم تلفن برای تماسهای تلفنی میباشد. با این حال مهمترین جنبه استفاده از VHF این است که تمام VHFهای دریایی برای استفاده از بسامدهای خاص و بدون در نظر گرفتن تولید کننده مطابق شرایط مورد توافق بین المللی طراحی و ساخته شده اند. این سامانه مخابراتی برای تمام دریانوردان در هرجای دنیا بسامدهای مشترکی فراهم آورده است تا بتوانند به راحتی ارتباط برقرار کنند.درحال حاضر تعداد 3 مجموعه بسامدهای بسامد VHF درحال استفاده در جهان امروز وجود دارد. اکثرVHFها امروزه دارای سوئیچ اختصاصی )ساده ترین راه( و یا یک آیتم منو میباشند، که اجازه میدهد بین این مجموعه کانالها تعویض انجام شود. خوشبختانه بسامدهای اصلی شرایط اضطراری و ایمنی کانالهای (6،13 ،16 ،67 و 70 )در هرسه استاندارد برای ارتباطات، بدون درنظر گرفتن تنظیمات رادیویی شما استاندارد میباشند. با این وجود، اگر کاربر مخابرات انتظار دارد که به طور مؤثر ارتباط برقرار کند، باید از اینکه کدام بسامد در منطقه مورد استفاده قرار میگیرد، آگاه باشد.رادیوهای دریایی ممکن است به عنوان قطعه اولیه تجهیزات ایمنی در کشتی محسوب شوند. استفاده از خاصیت تخصیص بسامد مشترک و روش های مناسب ارتباطات دریایی این ایمنی را افزایش میدهد.
اساساً 4 دسته ارتباطات دریایی وجود دارد.
شرایط اضطراری
شرایط فوری
شرایط ایمنی
شرایط عادی (معمولی)
در داخل این دسته ها از 3 سیگنال اضطراری شناخته شده بین المللی برای ارتباطات صوتی استفاده میشود:
MAYDAY با تلفظ DAYـMAY :این سیگنال شرایط اضطراری است و تنها نشان میدهد که کشتی در شرایط خطرناک قرار گرفته و نیاز به کمک فوری دارد.
PANـPAN :این سیگنال شرایط فوری است و زمانی استفاده میشود که ایمنی کشتی یا فرد در معرض خطر باشد.
SECURITE با تلفظ ”TAY – A – CURE – SAY :”این سیگنال شرایط ایمنی است و برای مشاوره دادن به دیگران در مورد ناوبری مهم یا هشدارهای آب و هوایی که ممکن است ایمنی دیگر کشتیها را تحت تأثیر قرار دهد مورد استفاده قرار میگیرد. وضعیت اضطراری در داخل سه دسته تقسیم شده است، به این معنی که هرکدام از این تماس ها باید در کانال 16 ایجاد شود، زیرا بسیاری دیگر ایستگاه های ساحلی در بسامد 7.24 به گوش هستند.
اولویت این سیگنال ها به ترتیب زیر میباشد:
ایمنی (SECURITE )بالاتر از هر ارتباطی عادی (معمولی) است.
ارتباطات فوری (PANـPAN )مقدمه ای بر ارتباطات ایمنی میشود.
ارتباط اضطراری (MAYDAY )بالاتر از همه دسته های دیگر ارتباطات است. دسته ارتباطات دریایی وجود دارد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
نحوه عملکرد رادار اِکتشاف زمین ( GPR). آنتن فرستنده و آنتن گیرنده ( پالسی)
نویسنده: افشین رشید
_4ss7.jpeg)
نحوه عملکرد آنتن در رادار اکتشاف زمین (GPR). آنتن فرستنده قبل از ضبط آنتن گیرنده ، پالسی را منتشر می کند که روی دو هدف (1 و 2) منعکس می شود. تا زمانی که سرعت امواج الکترومغناطیسی شناخته شود می توان اطلاعات زمان موجود در ردیابی (بازتاب های 1 و 2) را به عمق تبدیل کرد. آنتن ها را می توان در یک پروفایل در تنظیمات افست ثابت یا در تنظیمات میدان CMP منتقل کرد. برای موقعیت یابی و اکتشاف فلزات معدنی در عمق زمین، باید در نیمرخی عمود بر راستای آن داده برداری کنیم. هنگامی که جهت قطبش میدان الکتریکی با محور طولی یک جسم موازی است، انتظار بازتابها و شکستهایی با دامنه های بزرگ وجود دارد. این موضوع نشان میدهد که جهت مناسب آنتن نسبت به بی هنجاری امواج در اکتشاف فلزات معدنی میتواند اثرات بازتابها و شکستهای بالای سطح زمین را به کمترین مقدار برساند. تقریباً داده ها با نگه داشتن فرستنده و گیرنده در پیکربندی افست ثابت توسط آنتن های GPR جمع آوری میشود. وقتی دو هدف در یک پس زمینه یکنواخت تعبیه شده اند ، ترسیمی از اثری از جبران ثابت را نشان می دهد. یک بخش GPR از تعداد زیادی اثر جمع آوری شده در طول پروفایل تشکیل شده است و به این ترتیب مشاهده کننده این امکان را می دهد که اهداف را پیدا کند. هر ردیابی تصویر جدید از محیط اکتشاف بدست می آید.
![]()
داده ها از عمق زمین با استفاده از با یک پالس 1000 ولت جمع آوری میشود. آنتن فرستنده یک موجک پهنای باند را اشعه می کند که طیف دامنه ای به اندازه فرکانس مرکز آن دارد: 100 مگاهرتز. آنتن فرستنده الگوی تابش گسترده ای دارد که بین 90 تا 180 درجه می رسد. پیکربندی آنتن دو استاتیک امکان انعطاف پذیری بزرگی از استراتژی های جمع آوری داده را فراهم می آورد. آنتن ها با قدم ثابت 0.20 و 0.25 متر در طول پروفایل کشیده میشوند.
_itb.png)
در بسیاری از نرم افزارها ودستگاههای GPR ،با استفاده از برازش منحنی های سرعت پدیدار شده در رادارگرام مقدار سرعت متوسط سیر موج رادار تعیین میشود.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادارهای GPR (رادار آنالیز زمین برای اکتشاف) آشنایی و نحوه عملکرد
نویسنده: افشین رشید
رادار نافذ زمین GPR یک روش ژئوفیزیکی غیر مخرب است که بدون ایجاد مزاحمت در زمین ، امواج پروفیل مقطعی تولید می کند. از پروفایل های GPR برای ارزیابی مکان و عمق اشیاء مدفون و برای بررسی حضور و تداوم شرایط و ویژگی های زیرسطحی طبیعی استفاده می شود. GPR با انتقال پالسهای امواج رادیویی با فرکانس بالا از طریق مبدل یا آنتن ، به داخل زمین عمل می کند. انرژی منتقل شده از اشیاء مختلف دفن شده یا با تماس های مشخص بین مواد مختلف زمین بازتاب می یابد. سپس آنتن موج های منعکس شده را دریافت می کند و آنها را در رایانه ذخیره می کند.رادار نفوذی زمین GPR روشی ژئوفیزیکی بر پایـه انتـشار امـواج الکترو مغناطیسی است که درحکم روشی غیرمخرب بـرای به تصویر در آوردن لایه ها و بی هنجاری های زیرسطحی به کار می رود.ایـن روش بـه ســرعت بــه منزلــۀ یــک روش قابــل اعتمــاد در زمینــه هــای مهندسی عمران، باستان شناسی و کاربردهای دیگر شـناخته شده است .به طورکلی موفقیت در روش GPR ،به عواملی همچـون جنس خاک منطقه، نوع بی هنجاری و هدف مورد بررسی، طراحی صحیح عملیات برداشت و انتخاب درست آنـتن و درنهایت به کارگیری پارامترهای پردازشی مناسـب وابـسته اســت. دو عامــل خــاک محــل برداشــت و هــدف مــورد بررسی، عوامل خارج از کنترل هستند Rx به معنای امواج گیرنده حامل و TX به معنای امواج فرستنده حامل میباشد .که این (بسامد) در سیستم شناسایی رادار GPR مورد استفاده قرار میگیرد.انتخاب آنتن با توجـه بـه حـد تفکیـک هـر آنـتن ، اهمیـت زیادی دارد پردازش در GPR باید با توجه به شرایط ویژه هــر تحقیــق انجــام پــذیرد؛ چرا کــه بــه همــان انــدازه کــه به کارگیری پارامترهای پردازشی مناسب ممکن است مفید باشد؛ پردازش نامناسب میتواند گمراه کننده باشد. ایجاد مسیرهای جدید برای کابـل و یـا لولـه گـذاری در زیر زمین و همچنـین نگهـداری از تاسیـسات زیرسـطحی و محافظــــت از آن، هنگــــام عملیــــات خــــاکبرداری و ساخت و ساز، نیازمند داشتن آگـاهی کامـل از محـل دقیـق تاسیـسات زیـر سـطحی اسـت. توانـایی GPR بـا توجـه بـه وضوح رادارگرام ها، باعث شده است که این روش به منزلۀ روشی با دقت زیاد، در مکـان هـایی ماننـد خیابـان هـای پر تردد و یا سازه های عظیم به کار رود.
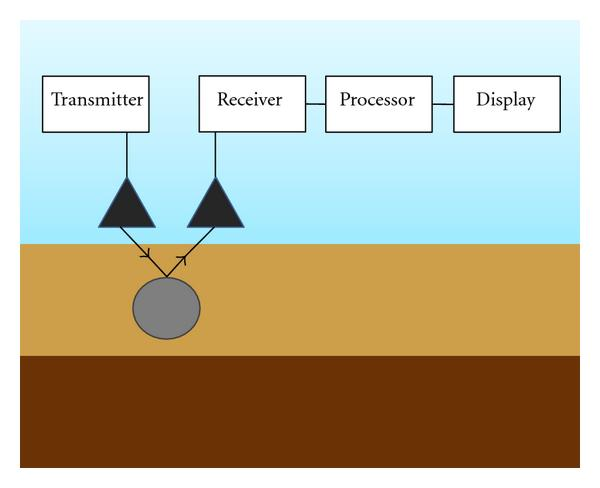
(بلوک دیاگرام) رادار های GPR (رادار آنالیز زمین برای اکتشاف)
در این روش آنتن هایی با پهناهای نوار بسامدی متفاوت(10-2000 مگاهرتز ) به کار گرفته می شود. طیف بسامدی با نام بسامد مرکزی آنتن استفاده شده در برداشت مشخص میشود. بسامد مرکزی، هم عمق نفـوذی موجـک GPR و هم تفکیک پذیری زمـانی و مکـانی رادار گـرام هـا را معـین مــیکنــد.(بنــابر ایــن چگونگی انتخاب آنتن، اصلی ترین عامل در برداشت هـای رادار به شمار می آید. برای مکان یابی بی هنجـاری هـایی بـا اندازه های متفاوت و طبیعتاً در عمـق هـای گونـاگون، یـک سری از مقاطع رادار برداشت شده بـا آنـتن هـای گونـاگون لازم است در برخـی از پروژه ها بـه جـای اسـتفاده از چنـد آنـتن بـا بـسامدهـای گوناگون ، از روشی به نام ترکیب چند بسامدی (Multiple compositing frequency) اسـتفاده مـی شود اگر چـه روش ترکیـب بـه منزلـۀ روشـی کم هزینه، می تواند تا حد مطلوبی موجب افزایش کیفیت و وضوح رادار گرام شود اما روش سـخت افـزاری اسـتفاده از چند آنتن و سـپس بـه کـارگیری پـردازش هـای خـاص هـر آنتن، مزیت های بیشتری از جمله کیفیت داده هـا و وضـوح بیشتر رادار گرام ها را دارد. این موضوع به یک تفسیر جامع برگرفته از چنـد رادار گـرام بـا آنـتن هـای گونـاگون منجـرخواهد شـد. اگـر نوارهـای بـسامدی، بـا توجـه بـه عمـق و چگونگی اهداف مورد بررسی، به درستی انتخاب شـوند و برای یک بررسی مـوردی از چنـدین آنـتن بـا بـسامد هـای مرکـزی متفـاوت اسـتفاده شـود،آنگاه در حین اکتشاف دارای حساسیت در عمق بیشتری خواهد بود.
_1ix1.png)
آنتن GPR در واقع پالس انرژی الکترومغناطیسی را به داخل زمین منتقل می کند. هنگامی که این انرژی به یک جسم می رسد ، پژواک می شود و توسط گیرنده آنتن اسیر می شود. نرم افزارهای رایانه ای از فرکانس پالس های منتقل شده و میزان تأخیر زمانی بین انتقال پالس ها و دریافت ها برای تهیه اطلاعات در مورد هدف استفاده می کنند. دامنه و وضوح عمق مربوط به فرکانس رادار ، قدرت انتقال یافته ، خاصیت الکترومغناطیسی مواد زمینی (خاک) و همچنین به شکل و مشخصات اهداف است.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
مهمترین اعمالی که یک رادار می تواند انجام دهد
نویسنده: افشین رشید
نکته: مهمترین اعمالی که یک رادار می تواند انجام دهد عبارتند از : 1 -واضح سازی اهداف ، 2 -آشکارسازی ، 3 -اندازه گیری ، 4 -دسته بندی
واضح سازی اهداف مربوط به توانایی رادار در جداسازی سیگنال هدف مطلوب از دیگر اهداف و جداسازی سیگنال مطلوب از سیگنالهای نامطلوب (نویز و موانع) می باشد . در حالت ایده آل می خواهیم که سیگنال اهداف مختلف مستقل از نزدیکی آنها به یکدیگر، از هم متمایز باشند . یکی از عوامل موثر در قابلیت تمایز بین اهداف، سیگنال ارسالی است. پهنای باند بزرگتر برای سیگنال ارسالی وضوح بهتری در پارامتر فاصله را در پی دارد. در حالیکه طول پالس طولانی تر منجر به وضوح بیشتری در فرکانس می گردد. همچنین خصوصیات آنتن نیز در آن موثر است. آنتن ها یی با پهنای باند فضایی کوچک وضوح بهتری را در موقعیت هدف نتیجه می دهد. عمل آشکارسازی شامل تشخیص حضور سیگنال بازگشتی از هدف مطلوب است. این مسئله به ظاهر ساده بنظر می رسد، اما در عمل به علت وجود سیگنال های ناخواسته و نویز گیرنده، عملی پیچیده است. می توان با طراحی مناسب گیرنده و ارسال سیگنالی با انرژی بیشتر در هر پالس اثر نویز را کاهش داد. همچنین با طراحی سیگنال ارسالی و روشهای پردازش سیگنال می توان میزان حضور سیگنال موانع را کم کرد. برای مشخص شدن محل جسم به تعریف دستگاه مختصات نیاز داریم.
اندازه گیری فاصله هدف بطور ضمنی در نام رادار نهفته است. اگر چه امروزه رادار های مدرن معمولا پارامترهایی بیشتر از فاصله شعاعی را اندازه گیری می کنند. آنها قادرند موقعیت هدف در فضای سه بعدی، بردار سرعت هدف (شامل سرعت آن در سه مولفه فضا)، جهت زاویه ای و بردار سرعت زاویه ای (نرخ تغییر زاویه در هر دو مولفه زاویه ای) را نیز بدست آورند. تمام این اندازه گیری ها می تواند بطور همزمان برای چند هدف در شرایطی که نویز و موانع نیز حضور دارند، محاسبه شود. اندازه سرعت شعاعی هدف با تغییر فاصله در یک بازه زمانی و یا از طرق شیفت فرکانس داپلر قابل اندازه گیری است. سرعت مطلق و جهت حرکت یک هدف متحرک با ردیابی آن می تواند بدست آید که از اندازه گیری های رادار از محل هدف در یک بازه زمانی محاسبه می شود. به همین روش می توان سرعت زوایه ای را نیز اندازه گیری کرد. بدست آوردن جهت زاویه هدف در یک بعد زاویه ای توسط دو بیم آنتن انجام می شود. این دو بیم به میزان کمی در زاویه جابجا می شوند و با مقایسه اندازه بازگشتی دریافت شده در هر بیم، اندازه زاویه بدست می آید. برای اندازه گیری در هر دو بعد زاویه ای به چهار بیم آنتن نیاز داریم و دقت این اندازه گیری به اندازه آنتن وابسته می باشد . صفحه نمایش رادار برای نشان دادن نتایج بدست آمده به صورت بصری برای کاربر می باشد و دارای انواع مختلفی است. سه نوع از نمایشگرهایی که امروزه در رادارهای کلاسیک بیشتر مورد استفاده قرار می گیرد در اسکوپ تصویر بالا ، جهت عمودی، تابعی از قدرت سیگنال پوش موج بازگشتی از هدف است. این تابعیت می تواند به صورت خطی یا لگاریتمی باشد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات) اجزای اصلی رادار (ساختار کلی عملکرد رادار)
نویسنده : افشین رشید
_(1)_dh7r.png)
انواع گوناگونی از رادار با کارهای متنوع، اهداف و محیط های عملکرد مختلف وجود دارد که منجر به تفاوت هایی در ساختار آنها گردیده است. اما بطور کلی می توان با ساختاری مشابه، عملکرد اکثر آنها را مورد بررسی قرار داد.ساختار کلی عملکرد رادار بخش فرستنده که به آنتن ارسال متصل است، امواج الکترومغناطیسی را به محیط اطراف منتشر می کند. آنتن گیرنده نیز آماده دریافت هر نوع موج بازگشتی از هدف می باشد. مسیر انتشار موج از فرستنده به هدف و سپس گیرنده کانال سیستم رادار را تشکیل می دهد.آنتن وظیف تبدیل جریان آن به موج الکترومغناطیسی را به عهده دارد. موج با سرعت نور منتشر شده و پس از برخورد با هدف، بخشی از انرژی (t (R وارد r آن بازتاب پیدا می کند. در واقع پس از طی مسافت 2R با سرعت نور، توسط آنتن گیرنده به صورت سیگنال sR سیستم گیرنده می گردد. با حضور این سیگنال، رادار به وجود هدف پی می برد.بخش فرستنده که به آنتن ارسال متصل است، امواج الکترومغناطیسی را به محیط اطراف منتشر می کند. آنتن گیرنده نیز آماده دریافت هر نوع موج بازگشتی از هدف می باشد. مسیر انتشار موج از فرستنده به هدف و سپس گیرنده ، کانال سیستم رادار را تشکیل می دهد. در شکل سیگنال ارسالی با (t(s نمایش داده شده است که آنتن وظیفه تبدیل آن به موج الکترومغناطیسی را به عهده دارد. موج با سرعت نور منتشر شده و پس از برخورد با هدف، بخشی از انرژی (t (R وارد r آن بازتاب پیدا می کند. در واقع پس از طی مسافت 2R با سرعت نور، توسط آنتن گیرنده به صورت سیگنال sRسیستم گیرنده می گردد. با حضور این سیگنال، رادار به وجود هدف پی می برد.
فرستنده که در اینجا بصورت یک تقویت کننده توان نشان داده شده است، شکل موجی متناسب با کاربرد رادار ایجاد می کند. توان متوسط آن می تواند در حدود چند میلی وات و یا به بزرگی چند مگا وات باشد. بیشتر رادارها از شکل موجهای پالس کوتاه استفاده می کنند و در نتیجه قادر خواهند بود با تقسیم زمان ارسال و دریافت تنها یک آنتن داشته باشند. داپلکسر، در حالتی که تنها یک آنتن داریم، برای حفاظت گیرنده از سیگنال ارسالی هنگام روش بودن فرستده می باشد. همانگونه که ذکر شد، وظیفه انتشار امواج و همچنین دریافت موجهای بازگشتی به عهده آنتن رادار است. تقریبا همیشه این آنتن ها به صورت جهت دار انتخاب می شوند به صورتی که بتوانند انرژی تشعشع شده را با یک بیم باریک و متمرکز شده ارسال کنند و به علاوه تعیین جهت هدف را نیز ممکن سازند. در واقع علاوه بر کار ارسال و P0F دریافت آنتن به صورت یک فیلتر فضایی P عمل می کند که زاویه های هدف را نیز مشخص می نماید. این نوع آنتن ها در حالت دریافت نیز دارای سطح موثر بالایی هستند و به این ترتیب دریافت بازگشتی های ضعیف را نیز ممکن می سازد. گیرنده سیگنالهای دریافتی ضعیف را تقویت می کند تا سطح آنها به حدی برسد که قابل شناسایی باشند. در این بین به دلیل اینکه نویز ، توان رادار در آشکارسازی و استخراج خصوصیات هدف را محدود می کند، تلاش می شود.گیرنده نویز کمی را به سیگنال بیفزاید. در فرکانس های ماکروویو که عملکرد اکثر رادار ها در آن محدوده است، نویز در P1F گیرنده از همان طبقه اول یعنی تقویت کننده با نویز کمP حضور دارد. P شناخته می شوند .
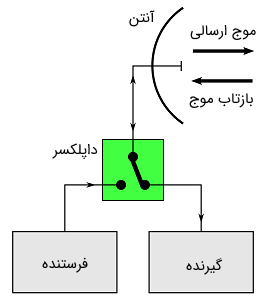
علت حضور اهداف نامطلوب در پیرامون رادار
وجود محدوده دینامیکیP3F به علت حضور اهداف نامطلوب در پیرامون رادار که به عنوان موانع P2FP بالا برای گیرنده لازم است. زیرا ممکن است برگشتی های موانع ، گیرنده را به حالت اشباع ببرند و آشکارسازی سیگنال های بازگشتی از اهداف مطلوب ، انجام نگیرد. محدوده دینامیکی که معمولا در گیرنده به صورت دسی بل بیان می شود برابر با نسبت حداکثر توان ورودی به حداقل آن است به صورتی که گیرنده بتواند همچنان بازده قابل قبولی از خود ارائه دهد. بخش پردازشگر سیگنال که معمولا در بخش IF گیرنده قرار دارد، بخشی است که سیگنال مطلوب را P است که نسبت از سیگنال ناخواسته که مخل فرآیند آشکارسازی است، جدا می سازد . این بخش شامل فیلتر منطبقP4Fتوان سیگنال به نویز را در خروجی حداکثر می سازد. همچنین بخش پردازش شامل پردازشگر داپلر می باشد تا در مواقعی که بازگشتی موانع بزرگتر از نویز گیرنده است، نسبت سیگنال هدف به سیگنال موانع را برای اهداف متحرک حداکثر سازد. به این ترتیب یک هدف متحرک از سایر اهداف متحرک یا از موانع مشخص می گردد. تصمیم برای آشکارسازی، در خروجی گیرنده انجام می گیرد. در واقع حضور یک هدف در صورتی تشخیص داده می شود که خروجی گیرنده از یک سطح آستانه مشخص بیشتر شود. اگر سطح آستانه خیلی کم در نظر گرفته شود، نویز گیرنده سبب P می گردد. در حالتیکه سطح آستانه را بزرگ انتخاب کنیم امکان آشکارسازی های اشتباه یا اصطلاحا اخطار اشتباه P5F آشکارسازی برخی اهداف را از دست می دهیم. در واقع سطح آستانه برای آشکارسازی را به گونه ای انتخاب می کنند که متوسط اخطار اشتباه در گیرنده برابر با مقداری قابل قبول و از پیش معین گردد. پس از آشکارسازی، در صورت لزوم می توان هدف را ردیابی نمود. ردیابی هدف به نوعی مکان هندسی محل هدف در طول زمان است و نمونه ای از پردازش داده ها بشمار می رود. اطلاعات پردازش شده آشکارسازی هدف و یا مسیر ردیابی آن برای کاربر رادار به نمایش در می آید . همچنین این اطلاعات می تواند مستقیما در اختیار یک سیستم هدایتی مانند سیستم هدایت خودکار قرار گیرد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات ) انواع رادار و اهداف آن (رادار فرستنده گیرنده پالسی p و مونو استاتیکP6FP)
نویسنده: افشین رشید
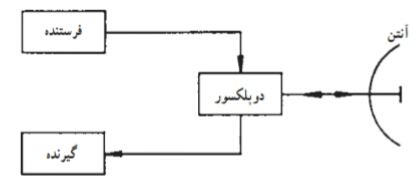
انواع رادار و اهداف آن بر اساس معیارهای گوناگون می توان دسته بندی های متفاوتی را برای بیان انواع رادار ارائه داد. رادار هایی که P و رادار هایی که فرستنده و گیرنده آنها در دو فرستنده و گیرنده آنها در یک محل می باشد رادارهای مونو استاتیک P6FP نامیده می شوند. در حالت اول فاصله هدف از فرستنده و گیرنده یکسان محل متفاوت واقع شده است، بای P7F استاتیک است اما در حالت بای استاتیک اینطور نیست. در مونواستاتیک که معمولا رادارها از این نوع هستند، برای ارسال و دریافت از یک آنتن استفاده می شود.در مواردی یک سیستم رادار دارای بیش از یک فرستنده و گیرنده می باشد که به صورت P خوانده می شود. یک شبکه عمل می کنند. این سیستم P8F ها مولتی استاتیکP ، راداری است که به طور همچنین رادارها را می توان براساس سیگنال ارسالی آنها دسته بندی کرد. نوع CWP9F پیوسته و معمولا با دامنه ثابت ارسال می کند. این سیگنال ارسالی می تواند با مدولاسیون FM و یا با فرکانسی ثابت فرستاده شود. هنگامی که شکل موج ارسالی به صورت پالسی است ( بامدولاسین FM و یا بدون آن) ، رادار پالسی P و غیر فعالP1F نامیده میشود. همچنین بر اساس وجود فرستنده یا نبود آن، رادارها بترتیب به دو دسته فعال P10FP تقسیم می شوند.بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. P نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
اهداف متحرک اهدافی هستند که نسبت به رادار دارای حرکت اند. اگر رادار بر روی زمین به طور ساکن باشد، اهداف طبیعی مانند جنگل یا زمین چمنزار حرکات نسبتا کندی را دارا هستند و پخش شدگی کمی در طیف فرکانسی سیگنال دریافتی ایجاد می کنند. باران و شکل های مشابه نیز دارای چنین حالتی هستند. قابل توجه بودن اثر سایر پدیده های آب و هوایی مانند طوفان، گردباد و غیره به فرکانس کاری رادار بستگی دارد. اهدافی مانند موشک، هواپیمای جت، ماهواره ها به میزانی سریع هستند که جابجایی طیفی قابل توجهی (ناشی از داپلر) در سیگنال دریافتی نسبت به سیگنال ارسالی ایجاد می کنند. در حالاتی که رادار متحرک است تمامی اهداف ساکن بر روی زمین متحرک در نظر گرفته می شوند. در ایجاد داپلر سرعت نسبی رادار و هدف نسبت به هم مطرح می باشد . دسته بندی دیگر اهداف رادار، فعال یا غیر فعال بودن آنهاست. به اهدافی که از خو د انرژی تشعشع می کنند فعال گفته می شود. سایر اهداف غیر فعال هستند. یک رادار برای سیستم راداری دیگر هدفی فعال بشمار می رود. از جمله اهداف فعال می توان بدن انسان را نیز نام برد. رادارهایی که با طول موج مادون قرمز کار می کنند می توانند تشعشعات ناشی از حرارت بدن را دریافت کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
انواع رادار و اهداف آن (رادار فرستنده گیرنده پالسی p و مونو استاتیکP6FP)
نویسنده : افشین رشید
انواع رادار و اهداف آن بر اساس معیارهای گوناگون می توان دسته بندی های متفاوتی را برای بیان انواع رادار ارائه داد. رادار هایی که و در رادار هایی که فرستنده و گیرنده آنها در دو فرستنده و گیرنده آنها در یک محل می باشد رادارهای مونو استاتیک P6FP نامیده می شوند. در مواردی حالت اول فاصله هدف از فرستنده و گیرنده یکسان محل متفاوت واقع شده است، بای P7F استاتیک است اما در حالت بای استاتیک اینطور نیست. در مونواستاتیک که معمولا رادارها از این نوع هستند، برای ارسال و دریافت از یک آنتن استفاده می شود. یک سیستم رادار دارای بیش از یک فرستنده و گیرنده می باشد که به صورت P خوانده می شود. یک شبکه عمل می کنند. این سیستم P8F ها مولتی استاتیکP ، راداری است که به طور همچنین رادارها را می توان براساس سیگنال ارسالی آنها دسته بندی کرد. نوع CWP9F پیوسته و معمولا با دامنه ثابت ارسال می کند. این سیگنال ارسالی می تواند با مدولاسیون FM و یا با فرکانسی ثابت فرستاده شود. هنگامی که شکل موج ارسالی به صورت پالسی است ( بامدولاسین FM و یا بدون آن) ، رادار پالسی P و غیر فعالP1F نامیده میشود. همچنین بر اساس وجود فرستنده یا نبود آن، رادارها بترتیب به دو دسته فعال P10FP تقسیم می شوند. بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.

اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. P نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
اهداف متحرک اهدافی هستند که نسبت به رادار دارای حرکت اند. اگر رادار بر روی زمین به طور ساکن باشد، اهداف طبیعی مانند جنگل یا زمین چمنزار حرکات نسبتا کندی را دارا هستند و پخش شدگی کمی در طیف فرکانسی سیگنال دریافتی ایجاد می کنند. باران و شکل های مشابه نیز دارای چنین حالتی هستند. قابل توجه بودن اثر سایر پدیده های آب و هوایی مانند طوفان، گردباد و غیره به فرکانس کاری رادار بستگی دارد. اهدافی مانند موشک، هواپیمای جت، ماهواره ها به میزانی سریع هستند که جابجایی طیفی قابل توجهی (ناشی از داپلر) در سیگنال دریافتی نسبت به سیگنال ارسالی ایجاد می کنند. در حالاتی که رادار متحرک است تمامی اهداف ساکن بر روی زمین متحرک در نظر گرفته می شوند. در ایجاد داپلر سرعت نسبی رادار و هدف نسبت به هم مطرح می باشد . دسته بندی دیگر اهداف رادار، فعال یا غیر فعال بودن آنهاست. به اهدافی که از خو د انرژی تشعشع می کنند فعال گفته می شود. سایر اهداف غیر فعال هستند. یک رادار برای سیستم راداری دیگر هدفی فعال بشمار می رود. از جمله اهداف فعال می توان بدن انسان را نیز نام برد. رادارهایی که با طول موج مادون قرمز کار می کنند می توانند تشعشعات ناشی از حرارت بدن را دریافت کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
اجزای اصلی رادار (ساختار کلی عملکرد رادار)
نویسنده: افشین رشید
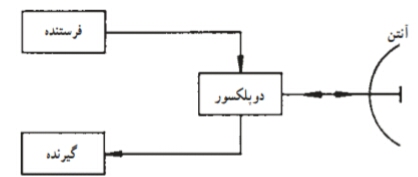
انواع گوناگونی از رادار با کارهای متنوع، اهداف و محیط های عملکرد مختلف وجود دارد که منجر به تفاوت هایی در ساختار آنها گردیده است. اما بطور کلی می توان با ساختاری مشابه، عملکرد اکثر آنها را مورد بررسی قرار داد.ساختار کلی عملکرد رادار بخش فرستنده که به آنتن ارسال متصل است، امواج الکترومغناطیسی را به محیط اطراف منتشر می کند. آنتن گیرنده نیز آماده دریافت هر نوع موج بازگشتی از هدف می باشد. مسیر انتشار موج از فرستنده به هدف و سپس گیرنده کانال سیستم رادار را تشکیل می دهد.
_34g.jpg)
آنتن وظیف تبدیل جریان آن به موج الکترومغناطیسی را به عهده دارد. موج با سرعت نور منتشر شده و پس از برخورد با هدف، بخشی از انرژی (t (R وارد r آن بازتاب پیدا می کند. در واقع پس از طی مسافت 2R با سرعت نور، توسط آنتن گیرنده به صورت سیگنال sR سیستم گیرنده می گردد. با حضور این سیگنال، رادار به وجود هدف پی می برد.بخش فرستنده که به آنتن ارسال متصل است، امواج الکترومغناطیسی را به محیط اطراف منتشر می کند. آنتن گیرنده نیز آماده دریافت هر نوع موج بازگشتی از هدف می باشد. مسیر انتشار موج از فرستنده به هدف و سپس گیرنده ، کانال سیستم رادار را تشکیل می دهد. در شکل سیگنال ارسالی با (t(s نمایش داده شده است که آنتن وظیفه تبدیل آن به موج الکترومغناطیسی را به عهده دارد. موج با سرعت نور منتشر شده و پس از برخورد با هدف، بخشی از انرژی (t (R وارد r آن بازتاب پیدا می کند. در واقع پس از طی مسافت 2R با سرعت نور، توسط آنتن گیرنده به صورت سیگنال sRسیستم گیرنده می گردد. با حضور این سیگنال، رادار به وجود هدف پی می برد.فرستنده که در اینجا بصورت یک تقویت کننده توان نشان داده شده است، شکل موجی متناسب با کاربرد رادار ایجاد می کند. توان متوسط آن می تواند در حدود چند میلی وات و یا به بزرگی چند مگا وات باشد. بیشتر رادارها از شکل موجهای پالس کوتاه استفاده می کنند و در نتیجه قادر خواهند بود با تقسیم زمان ارسال و دریافت تنها یک آنتن داشته باشند. داپلکسر، در حالتی که تنها یک آنتن داریم، برای حفاظت گیرنده از سیگنال ارسالی هنگام روش بودن فرستده می باشد. همانگونه که ذکر شد، وظیفه انتشار امواج و همچنین دریافت موجهای بازگشتی به عهده آنتن رادار است. تقریبا همیشه این آنتن ها به صورت جهت دار انتخاب می شوند به صورتی که بتوانند انرژی تشعشع شده را با یک بیم باریک و متمرکز شده ارسال کنند و به علاوه تعیین جهت هدف را نیز ممکن سازند. در واقع علاوه بر کار ارسال و P0F دریافت آنتن به صورت یک فیلتر فضایی P عمل می کند که زاویه های هدف را نیز مشخص می نماید. این نوع آنتن ها در حالت دریافت نیز دارای سطح موثر بالایی هستند و به این ترتیب دریافت بازگشتی های ضعیف را نیز ممکن می سازد. گیرنده سیگنالهای دریافتی ضعیف را تقویت می کند تا سطح آنها به حدی برسد که قابل شناسایی باشند. در این بین به دلیل اینکه نویز ، توان رادار در آشکارسازی و استخراج خصوصیات هدف را محدود می کند، تلاش می شود.گیرنده نویز کمی را به سیگنال بیفزاید. در فرکانس های ماکروویو کهعملکرد اکثر رادار ها در آن محدوده است، نویز در P1F گیرنده از همان طبقه اول یعنی تقویت کننده با نویز کمP حضور دارد. P شناخته می شوند .
علت حضور اهداف نامطلوب در پیرامون رادار
وجود محدوده دینامیکیP3F به علت حضور اهداف نامطلوب در پیرامون رادار که به عنوان موانع P2FP بالا برای گیرنده لازم است. زیرا ممکن است برگشتی های موانع ، گیرنده را به حالت اشباع ببرند و آشکارسازی سیگنال های بازگشتی از اهداف مطلوب ، انجام نگیرد. محدوده دینامیکی که معمولا در گیرنده به صورت دسی بل بیان می شود برابر با نسبت حداکثر توان ورودی به حداقل آن است به صورتی که گیرنده بتواند همچنان بازده قابل قبولی از خود ارائه دهد. بخش پردازشگر سیگنال که معمولا در بخش IF گیرنده قرار دارد، بخشی است که سیگنال مطلوب را P است که نسبت از سیگنال ناخواسته که مخل فرآیند آشکارسازی است، جدا می سازد . این بخش شامل فیلتر منطبقP4Fتوان سیگنال به نویز را در خروجی حداکثر می سازد. همچنین بخش پردازش شامل پردازشگر داپلر می باشد تا در مواقعی که بازگشتی موانع بزرگتر از نویز گیرنده است، نسبت سیگنال هدف به سیگنال موانع را برای اهداف متحرک حداکثر سازد. به این ترتیب یک هدف متحرک از سایر اهداف متحرک یا از موانع مشخص می گردد. تصمیم برای آشکارسازی، در خروجی گیرنده انجام می گیرد. در واقع حضور یک هدف در صورتی تشخیص داده می شود که خروجی گیرنده از یک سطح آستانه مشخص بیشتر شود. اگر سطح آستانه خیلی کم در نظر گرفته شود، نویز گیرنده سبب P می گردد. در حالتیکه سطح آستانه را بزرگ انتخاب کنیم امکان آشکارسازی های اشتباه یا اصطلاحا اخطار اشتباه P5F آشکارسازی برخی اهداف را از دست می دهیم. در واقع سطح آستانه برای آشکارسازی را به گونه ای انتخاب می کنند که متوسط اخطار اشتباه در گیرنده برابر با مقداری قابل قبول و از پیش معین گردد. پس از آشکارسازی، در صورت لزوم می توان هدف را ردیابی نمود. ردیابی هدف به نوعی مکان هندسی محل هدف در طول زمان است و نمونه ای از پردازش داده ها بشمار می رود. اطلاعات پردازش شده آشکارسازی هدف و یا مسیر ردیابی آن برای کاربر رادار به نمایش در می آید . همچنین این اطلاعات می تواند مستقیما در اختیار یک سیستم هدایتی مانند سیستم هدایت خودکار قرار گیرد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
اصول رادار (محاسبه PRT و PFN) علومِ مخابرات
نویسنده : افشین رشید
رادار سیستمی است که بر اساس خاصیت امواج الکترومغناطیسی عمل می نماید و با ارسال امواج و دریافت سیگنال منعکس شده از هدف ، مشخصات و مختصات هدف را ارائه می دهد.
محاسبه PRT: مدت زمان یک پالس از لبه بالا رونده تا لبه ی بالا رونده پالس بعدی در رادار میباشد.
محاسبه PRF : محاسبه مدت زمان یک پالس از لبه بالا رونده تا لبه ی بالا رونده پالس قبلی در رادار (بیشتر بازگشت به عملکرد قبلی برای شناسایی دقیق تر) میباشد.
عملکرد مدولاتور : مدولاتور تولید پالس 8µ sec می کند زیرا 1µ sec برای گرم شدن لامپ قبل از تولید سیگنال می باشد و 1µ sec جهت خروج کامل سیگنال از لامپ مگنترون می باشد.
Coho : تولید کننده سیگنال مرجع می باشد حدوداً30 MHZ
Stalo: تولید کننده سیگنال کریر می باشد حدود 1250 MHZ - 1350 MHZ
P.W: فاصله بین لبه ی بالا رودنده تا لبه پایین رونده ی پالس در رادار میباشد .
تقسیم بندی رادارها از نظر کاربرد:
رادار تجسسی
رادار اخطار اولیه
رادارهای ارتفاع یاب
رادارهای ردیاب
رادار کنترل آتش
رادارهای نجومی(فضایی)
رادارهای کنترل ترافیک
باند های فرکانسی برحسب استفاده در انواع رادارها(radar's frequency)
باند های فرکانسی استفاده شده در رادارها بیشتر Mega ؛ giga ؛ peta ؛ exa ؛ zetta و VHF میباشد .بیشتر رادارهای متداول در باند فرکانسی 220mHz تا 35GHz کار می کنند. رادارهای ماوراءِ افق ( oTh ) در باند فرکانسی 4 تا 5 مگاهرتز کار می کند.
باند VHF در رادار ها : این باند فرکانسی از اقتصادی ترین و مهم ترین بخش طیف الکترومغناطیس است که در جهت ساخت و عملیاتی کردن رادارهای بخصوصی با برد و قدرت بسیار زیاد و آنتن های بزرگ در مراقبت ماهواره ای به کار گرفته می شود. رادارهای در باند فرکانسی VHF از سیگنال های برگشتی جوی(Weather echo) با تضعیف دامنه تقریباً مصون می باشد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادارگریز و (رادارگریزی technology Stealth) نحوه عملکرد و کاربرد (علوم مخابرات)
نویسنده: افشین رشید

در برخی موارد رادار گریز ها با ارسال امواج VHF توسط رادار قابل شناسایی میباشند. و این ناشی از اختلافات سیگنال های بازگشتی است که در هنگام ارسال هیچ اختلافی (درواقع اختلاف فاز) با هم نداشتند. همچنین تداخل کمتر و مزایای سیگنالی بهتری در این روش نسبت به روش نامنسجم دارد.رادارگریزی (Stealth) به عمل پنهان شدن یا گریختن از دید رادار و وسایل آشکارساز گفته میشود. رادارگریزی بیش از اینکه یک تکنولوژی باشد، یک مفهوم است که گستره وسیعی از تکنولوژی ها و ویژگی های طراحی را در بر می گیرد. به عنوان یک مفهوم، رادارگریزی چیز جدیدی نیست. در مورد هواپیما ها، رادارگریزی به معنی پنهان شدن در برابر آشکار سازی توسط رادار است.
در کل میتوان گفت فناوری رادارگریزی/Stealth technology» به مجموعهای از اقدامات متقابل الکترونیکی و تاکتیکهای نظامی است که باعث سختتر شدن شناسایی تجهیزات و تسلیحات نظامی توسط رادار دشمن میشود.این تکنولوژی با این که نمیتواند به طور کامل امکان شناسایی هواپیما، زیردریایی، موشک یا ناو یا هر وسیله رادارگریز دیگری را از بین ببرد. اما با کاهش سطح مقطع راداری آن، فاصلهای که رادار میتواند به طور موثر آن را شناسایی کند به شدت کاهش میدهد. تاکتیکهایی مانند پرواز در ارتفاع بسیار پایین یا بالا، طراحی بدنه به شکلی که امواج راداری را منحرف کنند یا استفاده از موادی که امواج راداری را جذب میکنند از جمله روشهایی است که برای رادارگریز کردن یک شی استفاده میشوند.
چرا رادارگریزی؟؟؟
در مورد هواپیماها، رادارگریزی به معنی پنهان شدن در برابر آشکار سازی توسط رادار است. پس از جنگ دوم جهانی برخی طراحان هواپیما و استراتژیست ها نیاز به طراحی هواپیمایی که خط اثر راداری (radar signature) کوچکی داشته باشد را احساس کردند (یک خط اثر راداری بزرگی اثری است که یک هواپیما بر روی صفحه رادار در یک زاویه و مسافت مشخص بجای می گذارد. از خط اثر راداری اغلب به سطح مقطع راداری یا radar cross section یاد می شود). ولیکن به مدت چندین سال، توانایی آنها برای پنهان شدن از رادار به دلایل متعددی محدود بود. یک محدودیت عمده، ناتوانی طراحان هواپیما در تعیین نحوه دقیق انعکاس امواج رادار از روی هواپیما بود. و با شناسایی در رادار مورد هدف سیستم های پرتاب زمینی موشک قرار میگرفت .
برای همین رویکرد رادارگریزی مورد توجه قرار گرفت.
برچسبها: علوم مخابرات, مخابرات, مجله علوم مخابرات, فرکانس
مهمترین اعمالی که یک رادار می تواند انجام دهد(علومِ مخابرات)
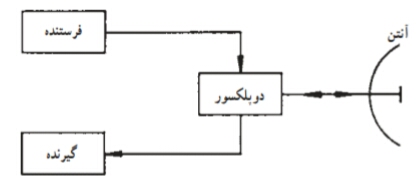
مهمترین اعمالی که یک رادار می تواند انجام دهد عبارتند از :
1 -واضح سازی اهداف ، 2 -آشکارسازی ، 3 -اندازه گیری ، 4 -دسته بندی
واضح سازی اهداف مربوط به توانایی رادار در جداسازی سیگنال هدف مطلوب از دیگر اهداف و جداسازی سیگنال مطلوب از سیگنالهای نامطلوب (نویز و موانع) می باشد . در حالت ایده آل می خواهیم که سیگنال اهداف مختلف مستقل از نزدیکی آنها به یکدیگر، از هم متمایز باشند . یکی از عوامل موثر در قابلیت تمایز بین اهداف، سیگنال ارسالی است. پهنای باند بزرگتر برای سیگنال ارسالی وضوح بهتری در پارامتر فاصله را در پی دارد. در حالیکه طول پالس طولانی تر منجر به وضوح بیشتری در فرکانس می گردد. همچنین خصوصیات آنتن نیز در آن موثر است. آنتن ها یی با پهنای باند فضایی کوچک وضوح بهتری را در موقعیت هدف نتیجه می دهد. عمل آشکارسازی شامل تشخیص حضور سیگنال بازگشتی از هدف مطلوب است. این مسئله به ظاهر ساده بنظر می رسد، اما در عمل به علت وجود سیگنال های ناخواسته و نویز گیرنده، عملی پیچیده است. می توان با طراحی مناسب گیرنده و ارسال سیگنالی با انرژی بیشتر در هر پالس اثر نویز را کاهش داد. همچنین با طراحی سیگنال ارسالی و روشهای پردازش سیگنال می توان میزان حضور سیگنال موانع را کم کرد. برای مشخص شدن محل جسم به تعریف دستگاه مختصات نیاز داریم.
اندازه گیری فاصله هدف بطور ضمنی در نام رادار نهفته است. اگر چه امروزه رادار های مدرن معمولا پارامترهایی بیشتر از فاصله شعاعی را اندازه گیری می کنند. آنها قادرند موقعیت هدف در فضای سه بعدی، بردار سرعت هدف (شامل سرعت آن در سه مولفه فضا)، جهت زاویه ای و بردار سرعت زاویه ای (نرخ تغییر زاویه در هر دو مولفه زاویه ای) را نیز بدست آورند. تمام این اندازه گیری ها می تواند بطور همزمان برای چند هدف در شرایطی که نویز و موانع نیز حضور دارند، محاسبه شود. اندازه سرعت شعاعی هدف با تغییر فاصله در یک بازه زمانی و یا از طرق شیفت فرکانس داپلر قابل اندازه گیری است. سرعت مطلق و جهت حرکت یک هدف متحرک با ردیابی آن می تواند بدست آید که از اندازه گیری های رادار از محل هدف در یک بازه زمانی محاسبه می شود. به همین روش می توان سرعت زوایه ای را نیز اندازه گیری کرد. بدست آوردن جهت زاویه هدف در یک بعد زاویه ای توسط دو بیم آنتن انجام می شود. این دو بیم به میزان کمی در زاویه جابجا می شوند و با مقایسه اندازه بازگشتی دریافت شده در هر بیم، اندازه زاویه بدست می آید. برای اندازه گیری در هر دو بعد زاویه ای به چهار بیم آنتن نیاز داریم و دقت این اندازه گیری به اندازه آنتن وابسته می باشد . صفحه نمایش رادار برای نشان دادن نتایج بدست آمده به صورت بصری برای کاربر می باشد و دارای انواع مختلفی است. سه نوع از نمایشگرهایی که امروزه در رادارهای کلاسیک بیشتر مورد استفاده قرار می گیرد
در اسکوپ تصویر بالا ، جهت عمودی، تابعی از قدرت سیگنال پوش موج بازگشتی از هدف است. این تابعیت می تواند به صورت خطی یا لگاریتمی باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادارهای آرایه فازی (رادار SAR ؛ mono pulse) علوم مخابرات
نویسنده: افشین رشید
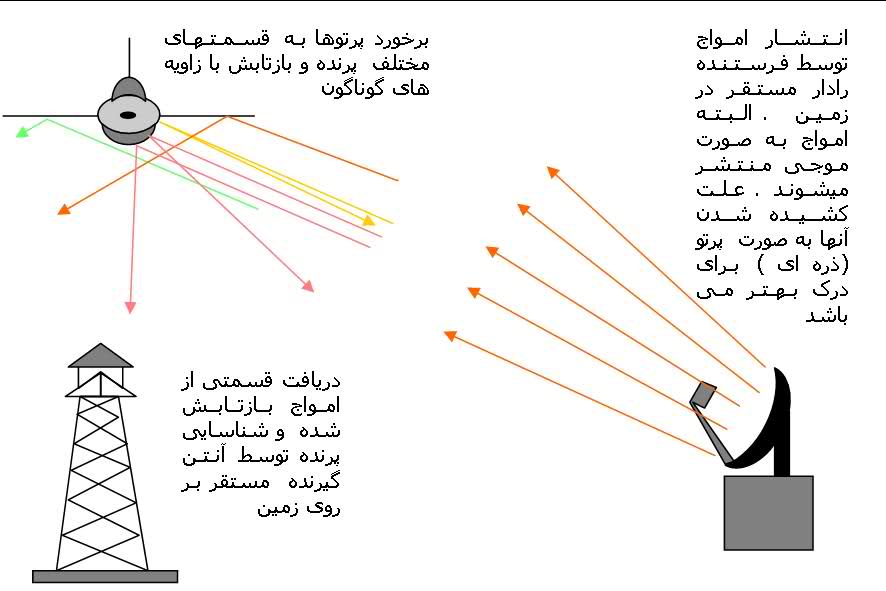
رادارهای آرایه فازی
به طور خلاصه در رادارهای آرایه فازی تعدادی آنتن، سیگنالهای با فاز متفاوت از یکدیگر تولید میکنند که این امر سبب تقویت سیگنال در جهت دلخواه و تضعیف آن در جهتهای نامناسب میشود. لذا به کمک این رادارها میتوان بدون نیاز به حرکت دادن مکانیکی جهت لوب اصلی آنتن را تغییر داد. علاوه بر این با توجه به تعدد آرایههای ارسال، دریافت میتوان هر تعداد از آرایههای یک آنتن را برای کار خاصی اختصاص داد.
دو گونهی اصلی رادارهای آرایه فازی عبارتاند از:
1- غیرفعال: در این نوع رادارها تغذیهی کلیهی آنتنها توسط یک منبع مولد واحد صورت میگیرد و به کمک شیفتدهندهای فاز میتوان فاز خروجی هر آرایه را تغییر داد. در این نوع آنتن تنها یک پرتو اصلی میتوان تولید کرد.
2- فعال: در این نوع رادارها هر آرایه مولد مستقلی دارد لذا کنترل بیشتری بر روی آرایهها وجود داشته و امکان تولید چندین پرتو اصلی وجود دارد. لازم به ذکر است قیمت تمام شدهی این نوع آنتن به علت پیچیدگیهای فراوان بیش از نوع غیرفعال است.
همانطور که در ساختار آنتن آرایه فازی امواج تولیدی مولد ابتدا وارد شیفت دهنده شده سپس به تعدادی آرایه ارسال دریافت وارد میشود. با کنترل شیفت دهندی فاز میتوان پرتو دلخواه را تولید کرد.

رادارهای SAR
برای تهیهی یک نقشه دقیق از زمین و عوارض موجود در آن لازم است از یک آنتن طویل استفاده کنیم اما امکان ساخت و بکارگیری راداری با آنتن بزرگ جهت دستیابی به رزولوشن بالا از عوارض زمینی امکانپذیر نیست. برای رفع این مشکل از تکنیک ردار دریچه مصنوعی یا SAR استفاده میشود. در این تکنیک هواگرد در حال حرکت اقدام به ارسال دریافت امواج کرده و بدین ترتیب یک آنتن طویل شبیه سازی میشود.
رادار منوپالس Monopulse
نام گذاری این نوع رادارها از آنجایی است که این رادار به کمک چند المان دریافت کننده (به طور معمول چهار المان) و تاباندن تنها یک پالس اطلاعات مورد نیاز از هدف را استخراج میکنند. از طریق مقایسه فاز و دامنه امواج ورودی به هر المان و انجام برخی محاسبات اطلاعات مورد هدف نیاز استخراج خواهد شد.
برچسبها: علوم مخابرات, مخابرات, مجله علوم مخابرات, فرکانس
نحوه عملکرد رادارهای بایاستاتیک Bistatic (علوم مخابرات )
نویسنده: افشین رشید
یک رادار بایاستاتیک در باند 390 الی 430 مگاهرتز کار می کند.
رادارهای بایاستاتیک Bistatic
در این نوع رادارها آنتن گیرنده و فرستنده در فاصلهای بسیار دور از یکدیگر قرار دارند.این امر سبب جلوگیری از تداخل مد فرستندگی/گیرندگی میشود و علاوه بر این سبب کاهش آسیبپذیری سامانه در برابر حملات هوایی میشود چرا که میتوان چندین آنتن گیرندهی پسیو را با یک فرستنده بکار گرفت. از این نوع رادار جهت رهگیری هواگردهایی که با فرمدهی خاص بدنه از دید رادار پنهان میشوند کاربرد دارد. در این نوع رادارها سیگنال پس از طی فاصلهی RT به هدف رسیده و بازتاب آن با طی فاصلهی RR به گیرنده میرسد. لذا مجموع این فاصله را میتوانیم به کمک فرمول زیر در صفحه رادار بیابیم:
{Ct=Rr+Rt}
در کل دستهبندی انواع رادارها را میتوان بر اساس به سختافزار، نرمافزار، تکنیکهای پردازش سیگنال، نوع کارکرد، فرکانس کاری و... انجام داد.
نقش اصلیِ یک سامانهٔ راداری، نظارت بر یک گسترهٔ بزرگ و تشخیص جسمهای متحرک، ردیابی هدفها و استخراج مشخصههایی مانند فاصله، جهت، سرعت، ارتفاع و اندازهٔ هدف است. رادارهای نظامی برای کاربردهای نظارت، ردیابی هدف، هدایت و ناوبری ، و دیدن از پشت موانع ساخته میشوند.
برچسبها: علوم مخابرات, مخابرات, مجله علوم مخابرات, فرکانس
رادارهای مونواستاتیک Monostatic ( علوم مخابرات)
فرکانس هایی که در دسته وی-اچ-اف (VHF ) قرار می گیرند از قابلیت بالایی در کشف اهداف پنهان کار برخوردارند .
رادارهای مونواستاتیک Monostatic
رادارهایی که فرستنده و گیرندهی آنها در یک نقطه واقع است را مونواستاتیک مینامیم. در واقع فاصلهی بین گیرنده و فرستنده در ای رادارها بسیار کوچکتر از فاصله نقطهی استقرار رادار نسبت به هدف است لذا فرستنده و گیرنده یک فضای یکسان را پوشش میدهند. در اغلب موارد فرستنده و گیرندهی رادار مونواستاتیک در یک سامانه تعبیه شده و از یک آنتن استفاده میکنند. جداسازی دو مود کاری گیرندگی و فرستندگی در این رادارهایی که از یک آنتن گیرنده فرستنده استفاده می کنند توسط واحدی به نام سلول گیرنده/فرستنده یا T/R cellیا داپلکسر Duplexer صورت میگیرد. این سلول وظیفه دارد در حالت فرستندگی ورودی گیرنده را بلوکه کند. در این رادارها به کمک اندازهگیری زمان رفت و برگشت سیگنال و ضرب آن در سرعت حرکت موج (سرعت نور) فاصله هدف استخراج میشود. همچنین سرعت هدف را میتوان به کمک خاصیت شیفت داپلر فرکانس اکو هدف محرک تشخیص داد.
کاربرد و کارکرد رادارهای مونواستاتیک
رادار جستجو و نظارت هوایی مونواستاتیک با برد نسبتاً بالا و دو بعدی و همچنین با برد در حدود 300 کیلومتر و سه بعدی و نمونه ای با قابلیت مقابله با جنگ الکترونیک تا 360 کیلومتر و انواعی از رادارهای پسیو است. فرکانس هایی که در دسته وی-اچ-اف قرار می گیرند از قابلیت بالایی در کشف اهداف پنهان کار برخوردارند .
گفتنی است رادارهایی که در آن فرستنده و گیرنده یکی هستند مونواستاتیک، آنهایی که فرستنده و گیرنده در دو نقطه متفاوت و فاصله دار هستند بایاستاتیک و مجموعه هایی با چند گیرنده و چند فرستنده جدا از هم مولتی استاتیک گفته می شود.گفتنی است یکی از روش های پنهان کاری رادار استفاده از سطوح زاویه دار یا منحنی در بدنه هواگرد به طوری است که بازتابش امواج به محل فرستنده برنگردد. با استفاده از رادارهایی با فرستنده و گیرنده فاصله دار که در محل های متفاوتی نصب شده اند، بازتاب های حاصله از هواگرد رادار گریز توسط گیرنده ای دیگر دریافت شده و در نتیجه هدف کشف می شود.
برچسبها: علوم مخابرات, مخابرات, مجله علوم مخابرات, فرکانس
رادار پالسی (تپی) نحوه عملکرد و کاربرد (علوم مخابرات)
نویسنده : افشین رشید
دسته بندی انواع رادارها را میتوان بر اساس به سختافزار، نرمافزار، تکنیکهای پردازش سیگنال، نوع کارکرد، فرکانس کاری و... انجام داد.
رادارهای پالسی Pulsed (تپی)
رادار پالسی راداری است که ابتدا یک پالس ارسال میکند و سپس منتظر رسیدن اکو اهداف میماند. این امر مانع از تداخل بین گیرندگی و فرستندگی میشود و امکان استفاده از یک آنتن واحد به عنوان گیرنده و فرستنده را فراهم میآورد. با اندازهگیری زمان بین ارسال و دریافت میتوان برد هدف را بدست آورد (در رادارهای مونواستاتیک)
از آنجا که رادارهای مونواستاتیک نمیتوانند همزمان به ارسال و دریافت امواج مبادرت ورزند دارای برد کور هستند که از طریق فرمول زیر قابل محاسبه است:
¥ ⅔CT² =RM
به عبارت دیگر رادار زمانی در مد گیرندگی قرار دارد که انتهای پالس ارسالی از آنتن خارج شده باشد. شایان ذکر است ممکن است پس از ارسال دو پالس اکوی پالس اول به رادار برسد که در این حالت دچار ابهام در برد خواهیم شد.حال اگر یک رادار پالسی از خاصیت شیفت داپلر جهت استخراج سرعت هدف استفاده کند به آن رادار پالس داپلری میگوییم.
برچسبها: علوم مخابرات, مخابرات, مجله علوم مخابرات, فرکانس
رادار چیست؟؟ (انواع رادار ؛ عملکرد و کاربرد ) علومِ مخابرات
نویسنده : دکتر افشین رشید
_6m2x.gif)
رادار یک دستگاه رادیویی است که برای مشاهده اجسام و اندازهگیری برخی ویژگیهای آنها به وسیله امواج الکترومغناطیسی به کار میرود. کاربرد اصلی رادار و محل پیدایش و رشد آن در صنایع نظامی و هوانوردی ؛ دریایی است.
نقش اصلی یک سیستم راداری نظارت بر یک محدوده بزرگ و تشخیص اجسام متحرک، ردیابی اهداف و استخراج مشخصاتی مانند سرعت و ارتفاع و ... میباشد.
رادار(radio detection and ranging) مخفف وبه معنای آشکارسازی به کمک امواج مایکرویو است .به طور کلی می توان عملکرد رادار را در چگونگی عملکرد سنسورهای آن خلاصه کرد . سنسورها سیگنال های مایکرویو را به سمت اهدف مورد نظر ارسال کرده وسپس سیگنال های بازتابیده شده از سطوح مختلف را شناسایی می کند
. قدرت (میزان انرژی) سیگنالهای پراکنده شده جهت تفکیک اهداف مورد استفاده قرارمی گیرد . با اندازه گیری فاصه زمانی بین ارسال ودریافت سیگنال ها می توان فاصله تا اهداف را مشخص کرد . از مزایای شاخص رادار می توان به عملکرد رادار در شب یا روز وهمچنین قابلیت تصویربرداری درشرایط آب و هوایی مختلف اشاره کرد. امواج مایکرویو قادر به نفوذ در ابر مه ,گردوغبار وباران می باشند . از آنجایی که عملکرد رادار با طرز کار سنسورهایی که با طیف های مرئی ومادون قرمز کار می کنند متفاوت است لذا می توان با تلفیق اطلاعات بدست آمده تصاویر دقیقی را بدست آورد.
انواع رادار(نحوه عملکرد و کاربرد) :
نواع رادار
رادارها با توجه به فرکانس کار ، محیط عمل ، قدرت فرستنده، حساسیت گیرنده، نوع آنتن و چندین عامل دیگر دسته بندی و هر یک در موارد خاصی به کارگیری می شوند و معمولا هر دسته نوع خاصی از فرستنده و سیستم پردازش سیگنال را مورد استفاده قرار می دهند .
_ موج رادار پالسی رادار موج پیوسته(سینوسی)
مکانیسم عمل همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند. به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که آیا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند ؛ حتی سرعت جسم نیز بخوبی قابل محاسبه است.
کاربردها نظارت و رهگیری هواپیماها و موشکها نظارت و رهگیری اهداف دریایی یا زمینی نظارت و رهگیری اجرام فضایی هواشناسی اندازه گیری سرعت وسایل نقلیه رادار؛ برای تصویر دو-بعدی و سه-بعدی پیداکردن مین در زمین فرود(برای نمونه برای هواپیما) دقیق عکسبرادری از کرههای دیگر با رادار تصویری پرهیز تصادم پیدا کردن آب در مناطق شنزار و خشک نظارت بر اهداف جنبنده در زمین نظارت بر اهداف جنبنده در مناطق پردرخت و جنگل های انبوه از موارد کاربرد رادار میباشد.
رادارهای پالسی (Pulse Transmission)
در این رادارها موج ارسالی به صورت یک پالس با فرکانس مشخص به نام PRF(فرکانس تکرار پالس) می باشد. نسبت دوره تناوبPRT زمان تکرار پالس به عرض پالس را نسبت به زمان کار می گویند. رادارهای پالسی با توجه به دوره تناوب و نسبت زمان کار دارای تنوع بوده که به مواردی از آنها اشاره می شود :
۱- رادارهای پالسی معمولی . در این رادارها معمولا عرض پالس در حدود چند میکروثانیه است و نسبت زمان کار بین حدود ۰٫۰۱ تا ۰٫۰۰۱ تغییر می کند. از این رادارها جهت هواشناسی و دیده بانی و مراقبت هوایی استفاده می شود.
۲- رادارهای پالسی با قدرت تفکیک بالا (High Resolution). در این رادارها عرض پالسی بسیار کوچک انتخاب می شود و چون میزان دقت در تشخیص فاصله توسط عرض پالسی مشخص می گردد دارای دقت بالایی در تشخیص فاصله هدف می باشد. (هر قدر عرض پالس کوچکتر باشد محاسبه فاصله دقیقتر است.) این رادارها برای آشکار سازی اهداف ساکن در حضور کلاتر (سیگنالهای برگشتی ناخواسته به صفحه رادار) و نیز تشخیص یک هدف در میان چند هدف نزدیک به هم قابل استفاده می باشد.
۳- رادار پالس فشرده(Pulse Compression) . این رادار از پالس های با عرض زیاد استفاده می نماید و برای افزایش دقت از مدولاسیون فاز یا فرکانس در هر پالس استفاده می کند. در نتیجه ضمن افزایش پهنای باند تشخیص دقیق فاصله اهداف نیز حاصل می شود و نسبت به رادار نوع قبلی دارای این مزیت است که توان پیک (حداکثر توان) فرستنده را در حد معتدلی نگاه می دارد .
رادار موج پیوسته (CW)
این رادار دارای نسبت زمان کار واحد می باشد،یعنی موج ارسالی به صورت پیوسته است . این نوع رادار نیز دارای انواع مختلف به ترتیب زیر است :
۱- رادار موج پیوسته معمولی : در این نوع رادار می توان سرعت و جهت حرکت هدف را در راستای خط واصل رادار تشخیص داد و امکان تشخیص فاصله به دلیل عدم استفاده از هرگونه مدولاسیون وجود ندارد و معمولا در ناوبری هوایی کاربرد دارند .
۲- رادار موج پیوسته مدوله شده فرکانس : در این رادار از مدولاسیون فرکانس برای افزایش پهنای باند و ایجاد امکان تشخیص فاصله استفاده می شود. از مهم ترین کاربردهای این نوع رادار ارتفاع سنجهای هواپیما می باشد.
۳- رادار موج پیوسته چند فرکانسه : در این نوع رادار با توجه به اختلاف فاز موج دریافتی از یک هدف در فرکانسهای مختلف می توان فاصله هدف را تشخیص داد.
رادار روزنه مصنوعی (Synthetic Aperture Radar)
در این رادار معمولا بیم آنتن در جهت عمود بر مسیر حرکت تنظیم می شود و دارای دقت بالایی در زاویه است .
عملکرد آنها مانند یک آنتن ساکن با تعداد زیادی آرایه می باشد. خروجی این نوع رادار یک تصویر با دقت بالا از صحنه ی مورد نظر می باشد. رادارهای فوق به دلیل ایجاد تصاویر دقیق کاربردهای فراوانی در علم زمین شناسی و جغرافی و همچنین در امور نظامی پیدا کردند. این رادار حتی قادر به ایجاد تصاویر سه بعدی از اشیا و اهداف می باشد .
برچسبها: علوم مخابرات, مخابرات, مجله علوم مخابرات, فرکانس
از بین بردن در همریختگی ناشی از اهداف ثابت در رادارها و سونارهای دریایی active sonar ؛ passive sonar (علوم مخابرات)
(تفاوت رادار با سونار sonar) بلوک دیاگرام یک رادار نسبتاً پیشرفته نشانگر از استفاده بخش ها و ماژول های مخابراتی مختلف در آن از (داپلکسر تا میکسر ) و نهایتاً Antena
تکنولوژی سونار چیست؟
سونار (sonar) ، ناوبری و تشخیص فاصله توسط صوت ( sound navigation and ranging)، تکنولوژی است که با استفاده از انتشار صدا در زیر آب قادر به شناسایی دیگر ناوها یا کشتی ها است
امروزه فیلترهای شانه ای در کاربرد های گسترده ای نظیر حذف نمودن هارمونیک های خطوط تغذیه و از بین بردن در همریختگی ناشی ازاهداف ثابت در رادارها و سونارهای نشان دهنده هدف متحرک استفاده می شوند.
تصویربرداری از اهداف زیر آب با استفاده از امواج صوتی، (sonar )
تصویربرداری از اهداف زیر آب با استفاده از امواج صوتی، مشابه روش به کار رفته در رادار روزنه مصنوعی، امکان پذیر است و در سال های اخیر در پژوهش های متعددی به موضوع سونار روزنه مصنوعی پرداخته شده است. در مواردی که نیاز به تصویربرداری از اهداف زیر آبی متحرک باشد، ایده سونار روزنه مصنوعی معکوس با الهام گرفتن از رادار روزنه مصنوعی معکوس قابل به کارگیری است اما باید شرایط و محدودیت های کانال زیر آب، مدنظر قرارگیرد. در سونار روزنه مصنوعی معکوس تک پایه و چالش های به کارگیری آن، سونار روزنه مصنوعی معکوس چندپایه ای پیشنهاد خواهد شد که با شرایط و هندسه خاص قرارگیری و با استفاده از منابع مجازی ایجاد شده به دلیل نحوه انتشار امواج در آب های کم عمق، تصاویر باکیفیت تری از اهداف متحرک زیر آب نسبت به حالت تک پایه ایجاد خواهد کرد. کیفیت بهتر تصاویر به دلیل دستیابی به چندگانگی مکانی ناشی از چندپایه کردن مجازی سونارهاست که با استفاده از خاصیت آب های کم عمق و چندمسیرگی موجود در آن و با استفاده از تنها یک فرستنده واقعی ایجاد گشته است.
تفاوت سونار با رادار:
رادارها امواج الکترومغناطیسی به کار می برند، و سونارها از امواج فراصوتی، که مانند امواج صوتی، ولی دارای بسامد بسیار بالا هستند استفاده می کنند. امواج فراصوتی هم مانند امواج صوتی و نور بازتابش می شوند. به کمک این امواج بازتابش شده ی نقشه ی سطح زیر دریاها و جای پستی و بلندی ها کاملاً مشخص می شود.
شرط عملکرد سیستم سونار :
نسبت سیگنال به پارازیت مشخص میکند که آیا سونار می تواند سیگنال هایی را در حضور پارازیت های زمینه در اقیانوس مشخص کند یا خیر.
برای این کار مواردی از جمله مرتبه منبع ، انتشار صدا ، جذب صدا ، اتلاف در انعکاس ، صداهای محدود و ویژگی های دریافت کننده در نظر گرفته می شود.
انواع سونار:
سونار دو نوع است :
۱) (سونار فعال)Active Sonar
۲) (سونار غیر فعال)Passive Sonar
سونار فعال ( محدوده پژواک ):
سیستم سونار فعال ، مثل ماهی یابها ، صداهای پژواک و سونارهای نظامی یک پالس صدا را می فرستند و منتظر پژواک آن می مانند . در سیستم سونار فعال منبع مانند یک دریافت کننده عمل میکند.
عملکرد سونار active فعال:
معادله باید موارد زیر را در نظر بگیرد:
بلندی شدت منبع صدا (مرتبه منبع)
انتشار صدا و میرایی هنگامی که پالس صدا از سونار به سوی هدف حرکت میکند(اتلاف حرکتی)
مقدار صدای منعکس و برگردانده شده به سمت سونار توسط هدف (توانایی هدف)
انتشار صدا و میرایی هنگامی که پالس منعکس شده به سوی دریافت کننده برمیگردد(اتلاف حرکتی)
پارازیتهای زمینه در دریافت کننده(مرتبه پارازیتها)
عبارتها در معادلات سونار بر حسب دسیبل هستند و با یکدیگر جمع میشوند تا معادلات سونار را بوجود آورند.
عملکرد سونار passive غیر فعال:
سونار غیر فعال با ایجاد پالس های صوتی (معروف به پینگ) ، وسپس گوش دادن به پالس بازگشتی عمل میکند . برای تشخیص فاصله از هدف ، شخص می تواند مدت زمان بین دریافت و ارسال پالس را اندازه گیری کند. برای اندازه گیری جهت و راستای هدف می توان از هیدروفونیک های متعدد استفاده کرده ، و سپس زمان دریافت پالس توسط هر یک از این هیدروفون ها را اندازه گرفت ، و با مقایسه این زمان ها به راحتی می توان جهت و راستای هدف را تعیین نمود .
برچسبها: علوم مخابرات, مخابرات, مجله علوم مخابرات, فرکانس
(علوم مخابرات ) انواع رادار و اهداف آن (رادار فرستنده گیرنده پالسی p و مونو استاتیکP6FP)
نویسنده : افشین رشید
انواع رادار و اهداف آن بر اساس معیارهای گوناگون می توان دسته بندی های متفاوتی را برای بیان انواع رادار ارائه داد. رادار هایی که P و رادار هایی که فرستنده و گیرنده آنها در دو فرستنده و گیرنده آنها در یک محل می باشد رادارهای مونو استاتیک P6FP نامیده می شوند. در حالت اول فاصله هدف از فرستنده و گیرنده یکسان محل متفاوت واقع شده است، بای P7F استاتیک است اما در حالت بای استاتیک اینطور نیست. در مونواستاتیک که معمولا رادارها از این نوع هستند، برای ارسال و دریافت از یک آنتن استفاده می شود.در مواردی یک سیستم رادار دارای بیش از یک فرستنده و گیرنده می باشد که به صورت P خوانده می شود. یک شبکه عمل می کنند. این سیستم P8F ها مولتی استاتیکP ، راداری است که به طور همچنین رادارها را می توان براساس سیگنال ارسالی آنها دسته بندی کرد. نوع CWP9F پیوسته و معمولا با دامنه ثابت ارسال می کند. این سیگنال ارسالی می تواند با مدولاسیون FM و یا با فرکانسی ثابت فرستاده شود. هنگامی که شکل موج ارسالی به صورت پالسی است ( بامدولاسین FM و یا بدون آن) ، رادار پالسی P و غیر فعالP1F نامیده میشود. همچنین بر اساس وجود فرستنده یا نبود آن، رادارها بترتیب به دو دسته فعال P10FP تقسیم می شوند.بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. P نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
اهداف متحرک اهدافی هستند که نسبت به رادار دارای حرکت اند. اگر رادار بر روی زمین به طور ساکن باشد، اهداف طبیعی مانند جنگل یا زمین چمنزار حرکات نسبتا کندی را دارا هستند و پخش شدگی کمی در طیف فرکانسی سیگنال دریافتی ایجاد می کنند. باران و شکل های مشابه نیز دارای چنین حالتی هستند. قابل توجه بودن اثر سایر پدیده های آب و هوایی مانند طوفان، گردباد و غیره به فرکانس کاری رادار بستگی دارد. اهدافی مانند موشک، هواپیمای جت، ماهواره ها به میزانی سریع هستند که جابجایی طیفی قابل توجهی (ناشی از داپلر) در سیگنال دریافتی نسبت به سیگنال ارسالی ایجاد می کنند. در حالاتی که رادار متحرک است تمامی اهداف ساکن بر روی زمین متحرک در نظر گرفته می شوند. در ایجاد داپلر سرعت نسبی رادار و هدف نسبت به هم مطرح می باشد . دسته بندی دیگر اهداف رادار، فعال یا غیر فعال بودن آنهاست. به اهدافی که از خو د انرژی تشعشع می کنند فعال گفته می شود. سایر اهداف غیر فعال هستند. یک رادار برای سیستم راداری دیگر هدفی فعال بشمار می رود. از جمله اهداف فعال می توان بدن انسان را نیز نام برد. رادارهایی که با طول موج مادون قرمز کار می کنند می توانند تشعشعات ناشی از حرارت بدن را دریافت کنند.
برچسبها: علوم مخابرات, مخابرات, مجله علوم مخابرات, فرکانس
نانو پوشش های با ساختار ضد امواج و ضد رادار (علوم مخابرات_نانو)
نویسنده : افشین رشید
نانو پوشش های هوشمند، ضرورت بهره گیری از فناوری نانو در ساخت و تولید پوشش های ضد امواج و رادار گریز هوشمند آشکارتر گردیده است.یکی از راه های نامرئی کردن تجهیزات نظامی مانند هواپیماها، کشتی ها و زیردریایی ها از دید رادارها، استفاده از پوشش های هوشمند است. اساس کار رادارها بر تولید و انتشار امواج الکترومغناطیسی با یک فرستنده و دریافت پژواک احتمالی از طریق گیرنده است. در صورت وجود پژواک، صفحه نمایش رادار آن را به صورت یک نقطه نورانی نشان می دهد، همچنین رادارها با محاسبه مدت رفت و برگشت امواج قادر به تشخیص فاصله و سرعت هدف هستند. فلزات، امواج رادار را به خوبی منعکس می کنند؛ لذا بدنه فلزی یک هواپیما جسمی ایده آل برای انعکاس سیگنال های منتشر شده از سوی یک رادار است. برای نامرئی کردن اهداف نظامی مانند هواپیماها و کشتی ها نیز به کار می رود:
تغییر شکل بدنه اهداف نظامی: با تغییر شکل بدنه اهداف نظامی می توان انعکاس امواج انتشار یافته از رادار را به سمتی غیر از تجهیزات رادار هدایت کرد. بیشتر از هواپیماهای موجود شکلی منحنی دارند.
این نوع طراحی در ضمن اینکه آنها را آیرودینامیک می کند، سبب می شود امواج رادار با برخورد به هر جای هواپیما، به طرف تجهیزات رادار منعکس گردد، در حالی که با تغییر شکل سازه از حالت منحنی به سطوح با لبه های تیز می توان موجب پخش امواج رادار در جهاتی غیر از جهات قابل تشخیص توسط رادار شد.
کاربردهای نانو پوشش ها جذبی در صنایع چند گانه نظامی( پوشش غیر رهگیری)
نانو پوشش های هوشمند با بهره گیری از نانوذرات فعال و گروه های عاملی مناسب در ساختار مَحمل قادرند تا در مقابل محرک های محیطی عکس العمل های هوشمندانه محافظتی، ترمیمی، جذبی، دفعی و یا خنثی کننده نشان دهند. از کاربردی ترین نانوپوشش های هوشمند در صنایع نظامی، هوافضا دریایی می توان به پوشش های هوشمند ضد رادار اشاره کرد که قادر به تشخیص زودهنگام و جلوگیری از شناسایی تجهیزات فلزی هستند. همچنین از نانو پوشش های زیست فعال نظیر پوشش های ضدباکتری و ضدخزه، برای جلوگیری از تخریب ناشی از تجمع میکروارگانیسم ها بر روی سازه های فلزی و پیشگیری از افزایش وزن تجهیزات دریایی استفاده می شود. مانند زیر دریایی ها و ناوچه های نظامی و تجهیزاتی و رادارهایی که در عمق دریا مورد استفاده قرار میگیرند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات ) رادارهای GPR (رادار آنالیز زمین برای اکتشاف) آشنایی ،نحوه عملکرد، کاربرد ها
نکته: رادار نافذ زمین GPR یک روش ژئوفیزیکی غیر مخرب است که بدون ایجاد مزاحمت در زمین ، امواج پروفیل مقطعی تولید می کند.
از پروفایل های GPR برای ارزیابی مکان و عمق اشیاء مدفون و برای بررسی حضور و تداوم شرایط و ویژگی های زیرسطحی طبیعی استفاده می شود. GPR با انتقال پالسهای امواج رادیویی با فرکانس بالا از طریق مبدل یا آنتن ، به داخل زمین عمل می کند. انرژی منتقل شده از اشیاء مختلف دفن شده یا با تماس های مشخص بین مواد مختلف زمین بازتاب می یابد. سپس آنتن موج های منعکس شده را دریافت می کند و آنها را در رایانه ذخیره می کند.رادار نفوذی زمین GPR روشی ژئوفیزیکی بر پایـه انتـشار امـواج الکترو مغناطیسی است که درحکم روشی غیرمخرب بـرای به تصویر در آوردن لایه ها و بی هنجاری های زیرسطحی به کار می رود.ایـن روش بـه ســرعت بــه منزلــۀ یــک روش قابــل اعتمــاد در زمینــه هــای مهندسی عمران، باستان شناسی و کاربردهای دیگر شـناخته شده است .به طورکلی موفقیت در روش GPR ،به عواملی همچـون جنس خاک منطقه، نوع بی هنجاری و هدف مورد بررسی، طراحی صحیح عملیات برداشت و انتخاب درست آنـتن و درنهایت به کارگیری پارامترهای پردازشی مناسـب وابـسته اســت. دو عامــل خــاک محــل برداشــت و هــدف مــورد بررسی، عوامل خارج از کنترل هستند .
نکته : Rx به معنای امواج گیرنده حامل و TX به معنای امواج فرستنده حامل میباشد .که این (بسامد) در سیستم شناسایی رادار GPR مورد استفاده قرار میگیرد.
انتخاب آنتن با توجـه بـه حـد تفکیـک هـر آنـتن ، اهمیـت زیادی دارد پردازش در GPR باید با توجه به شرایط ویژه هــر تحقیــق انجــام پــذیرد؛ چرا کــه بــه همــان انــدازه کــه به کارگیری پارامترهای پردازشی مناسب ممکن است مفید باشد؛ پردازش نامناسب میتواند گمراه کننده باشد. ایجاد مسیرهای جدید برای کابـل و یـا لولـه گـذاری در زیر زمین و همچنـین نگهـداری از تاسیـسات زیرسـطحی و محافظــــت از آن، هنگــــام عملیــــات خــــاکبرداری و ساخت و ساز، نیازمند داشتن آگـاهی کامـل از محـل دقیـق تاسیـسات زیـر سـطحی اسـت. توانـایی GPR بـا توجـه بـه وضوح رادارگرام ها، باعث شده است که این روش به منزلۀ روشی با دقت زیاد، در مکـان هـایی ماننـد خیابـان هـای پر تردد و یا سازه های عظیم به کار رود.
(بلوک دیاگرام) رادار های GPR (رادار آنالیز زمین برای اکتشاف)
در این روش آنتن هایی با پهناهای نوار بسامدی متفاوت(10-2000 مگاهرتز ) به کار گرفته می شود. طیف بسامدی با نام بسامد مرکزی آنتن استفاده شده در برداشت مشخص میشود. بسامد مرکزی، هم عمق نفـوذی موجـک GPR و هم تفکیک پذیری زمـانی و مکـانی رادار گـرام هـا را معـین مــیکنــد.(بنــابر ایــن چگونگی انتخاب آنتن، اصلی ترین عامل در برداشت هـای رادار به شمار می آید. برای مکان یابی بی هنجـاری هـایی بـا اندازه های متفاوت و طبیعتاً در عمـق هـای گونـاگون، یـک سری از مقاطع رادار برداشت شده بـا آنـتن هـای گونـاگون لازم است در برخـی از پروژه ها بـه جـای اسـتفاده از چنـد آنـتن بـا بـسامدهـای گوناگون ، از روشی به نام ترکیب چند بسامدی (Multiple compositing frequency) اسـتفاده مـی شود اگر چـه روش ترکیـب بـه منزلـۀ روشـی کم هزینه، می تواند تا حد مطلوبی موجب افزایش کیفیت و وضوح رادار گرام شود اما روش سـخت افـزاری اسـتفاده از چند آنتن و سـپس بـه کـارگیری پـردازش هـای خـاص هـر آنتن، مزیت های بیشتری از جمله کیفیت داده هـا و وضـوح بیشتر رادار گرام ها را دارد. این موضوع به یک تفسیر جامع برگرفته از چنـد رادار گـرام بـا آنـتن هـای گونـاگون منجـرخواهد شـد. اگـر نوارهـای بـسامدی، بـا توجـه بـه عمـق و چگونگی اهداف مورد بررسی، به درستی انتخاب شـوند و برای یک بررسی مـوردی از چنـدین آنـتن بـا بـسامد هـای مرکـزی متفـاوت اسـتفاده شـود،آنگاه در حین اکتشاف دارای حساسیت در عمق بیشتری خواهد بود.
آنتن GPR در واقع پالس انرژی الکترومغناطیسی را به داخل زمین منتقل می کند. هنگامی که این انرژی به یک جسم می رسد ، پژواک می شود و توسط گیرنده آنتن اسیر می شود. نرم افزارهای رایانه ای از فرکانس پالس های منتقل شده و میزان تأخیر زمانی بین انتقال پالس ها و دریافت ها برای تهیه اطلاعات در مورد هدف استفاده می کنند. دامنه و وضوح عمق مربوط به فرکانس رادار ، قدرت انتقال یافته ، خاصیت الکترومغناطیسی مواد زمینی (خاک) و همچنین به شکل و مشخصات اهداف است.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
رادار سِرچ های رَهگیر (Radar search) نحوه عملکرد و کاربرد (علوم مخابرات)
نویسنده: افشین رشید
کاربرد اصلی یک رادار رهگیر که گاهاً از آن به عنوان رادار کنترل آتش نیز استفاده میشود تهیهی مختصات سه بعدی زاویه عمودی، افقی و فاصله از هدف است. این اطلاعات جهت شلیک صحیح گلولههای واحد توپخانه یا موشکهای هدایت شونده ضروری است.پس از تعیین مختصات تقریبی یک هدف توسط رادار جستوجو (سرچ) و مشخص شدن آن به عنوان واحد متخاصم اطلاعات دو بعدی هدف شامل برد و زاویه افقی در اختیار واحد کنترل آتش قرار میگیرد و در این حین رادار دقیقتر یعنی رادار رهگیر شروع به جستوجوی حول مختصات تقریبی می کند تا اطلاعات دقیق هدف را کسب نماید. رادار جست و جو به کمک یک پرتو بادبزنی شکل (باریک در افق پهن در فراز) شروع به جستوجوی 360 درجهای محیط می کند و پس از کشف تقریبی مکان هدف، آنرا به رادار کنترل آتش واگذار میکند، در این حین رادار رهگیر یا کنترل آتش به کمک یه پرتو نوک مدادی (باریک در افق و فراز) مکان دقیق هدف را استخراج مینماید.
دقت رادار رهگیر (Radar search)
دقت رادار رهگیر ارتباط تنگاتنگی با باریک بوودن هرچه بیشتر پرتو نوک مدادی دارد البته ذکر این نکته ضروری است که باریکی بیش از حد پرتو ممکن است باعث گریز هدف از دید رادار و عدم اکتشاف آن گردد.
در رادارهای جستوجوی جدید این امکان فراهم گردید که اطلاعات سه بعدی تقریبی هدف استخراج گردد که این امر به رهگیری هرچه سریعتر هدف میانجامد. البته در برخی سامانهها رادار رهگیر و جست وجو در واقع یک رادار هستند و پس از استخراج اطلاعات سه بعدی تقریبی هدف سامانه وارد حالت رهگیر میشود و پس از استخراج اطلاعات مکانی هدف انرا در اختیار واحد آتش قرار میدهد.
دقت مورد نیاز برای یک رادار رهگیر تا اندازهی زیادی به ماهیت ذاتی واحد درگیر شونده دارد به عنوان مثال یک سامانه توپخانهای انرژی جنبشی با نواخت پایین به مراتب به دقت بالاتری نیاز دارد تا یک واحد موشکی مجهز به موشکهای هدایت شونده با سرجنگی ترکش شونده یا یک توپ گتلینگ مسلح به گلولههای مجهز به فیوز.
چند رادار در این سامانه مشاهده میشود؟ تفاوت هریک در چیست؟
دو عامل مهم دقت رادارهای رگیری را تحت تاثیر قرار میدهد: یکی عوامل ذاتی که به ماهیت و نوع سامانهی راداری بستگی دارد و دیگری عامل خارجی که به ماهیت هدف و نیز وضعیت آب و هوایی بستگی دارد. در حال حاضر انواع متعددی از رادارهای رهگیری در دسترس قرار دارند که دقت، پیکربندی و قیمت آنها متفاوت است. از مهمترین رادارهای رهگیری رادار اسکن نوک مدادی است که در ادامه به تشریح آن میپردازیم.
رادار اسکن نوک مدادی (مخروطی) سیگنال سینوسی
در این نوع رادار جهت پرتو برابر با جهت دید رادار نیست و پرتو حول نقطهی تقریبی هدف به چرخش در میآید. نام گذاری این نوع رادار از آنجایی نشأت میگیرد که دارای پرتویی نوک مدادی شکل چرخند حول محل تقریبی هدف است. زمانی که هدف در نقطهای حول محور پرتو چرخنده باشد توان بازتابیده از آن ثابت خواهد بود (نه ماکزیمم). زمانی که هدف در نقطهی مشخص شده باشد توان بازتابیده از آن به صورت متناوب و مناسب با فرکانش اسکن مخروطی (بسته به سرعت چرخش پرتو) تغییر خواهد کرد.
زمانی که پرتو بازتابیده از هدف دارای بیشترین توان بود محور مرکزی پرتو دقیقا به سمت هدف تابانده شده است با توجه به موارد یادشده و پردازش سیگنال بازتابیده از هدف میتوان اطلاعات مکانی هدف را به طور دقیق استخراج کرد.
چرخش پرتو ممکن است به صورت مکانیکی یا الکترونیکی باشد. در حالت چرخش مکانیکی زاویه محور مرکزی آنتن به دقت و توسط موتورهای سروو حرکت داده میشود.
نوع دیگری از رادارهای اسکن مخروطی نیز وجود دارد که به آنها رادارهای اسکن مخروطی منحصر به گیرنده (Conical scan on receive only (COSRO)) گوییم. در این نوع رادارها فرستنده ثابت بوده و پرتو مخروطی تولید میکند و این آنتن گیرنده است که با چرخش خود در جهتهای مختلف توانهای مختلف بازتابیده از هدف را دریافت کرده مکان هدف را استخراج میکند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
آشنایی با روش رادار نفوذی زمین GPR امواج اِکتشافی (علوم مخابرات) قدرت نفوذ و ضریب توان
نویسنده: افشین رشید
Ground Penetrating Radar (GPR) یا روش رادار نفوذی زمین یکی از روشهای ژئوفیزیکی با قدرت تفکیک بالا است که توسط امواج الکترومغناطیسی با فرکانس بالا، تغییرات خواص الکتریکی را در اعماق کم آشکارسازی میکند. این روش کاربرد گسترده ای در اکتشاف کانسارهای متعدد فلزی و غیرفلزی، تعیین موقعیت حفره های کارستی، اکتشاف منابع آب زیر زمینی، مکان یابی تاسیسات زیرزمینی مانند لوله، کابل، کانال، قنات و شناسایی شکستگی ها و درز و شکاف ها دارد. از مزایای نسبت به دیگر روش های ژئوفیزیک اکتشافی و مهندسی، می توان به غیر مخرب بودن، دقت و قدرت تفکیک بالا، برداشت سریع و ارزان اشاره کرد. در این روش، امواجی از دستگاه GPR ساطع شده و به داخل زمین نفوذ میکند. این امواج در برخورد با ناپیوستگیها، به دلیل تغییر در گذردهی الکتریکی در دو طرف مرز مشترک دو محیط، بازتاب میشوند. بازتابشها توسط دستگاه دریافت شده و با توجه به سرعت این امواج که در محیطهای مختلف متفاوت است میتوان اطلاعاتی مانند جنس محیط، عمق مواد مدفون، موقعیت مرز لایههای درون زمین و … را به دست آورد.
قدرت نفوذ و دقت روش GPR
قدرت نفوذ و دقت روش GPR وابسته به فرکانس موجی است که توسط دستگاه به درون زمین ارسال میشود. هر چه این موج فرکانس پایینتری داشته باشد، قدرت نفوذ آن افزایش مییابد و میتوان لایههای عمیقتری از زمین را توسط این موج شناسایی نمود. اما در مقابل قدرت تفکیک و در نتیجه دقت روش کمتر میشود. یعنی در اعماق کمتر قدرت تفکیک بالاتری وجود دارد و اجسام با ابعاد کوچک تر را نیز میتوان شناسایی نمود. اما هر چه عمق بیشتر میشود، اجسام باید ابعاد بزرگتری داشته باشند تا توسط این روش قابل شناسایی باشند.
دستگاههای GPR معمولا دارای آنتنهای مختلف میباشند. هر کدام از این آنتنها قادر هستند تا موج با فرکانس خاصی را از خود ساطع کنند. با توجه به موارد گفته شده، هر کدام از این آنتنها جهت شناسایی هدف خاصی مورد استفاده قرار میگیرند.
برچسبها: امواج, آنتن ها, علوم مخابرات, افشین رشید
از بین بردن در همریختگی ناشی از اهداف ثابت در رادارها و سونارهای دریایی active sonar ؛ passive sonar (علوم مخابرات)
نویسنده: افشین رشید
(تفاوت رادار با سونار sonar) بلوک دیاگرام یک رادار نسبتاً پیشرفته نشانگر از استفاده بخش ها و ماژول های مخابراتی مختلف در آن از (داپلکسر تا میکسر ) و نهایتاً Antena
تکنولوژی سونار چیست؟
سونار (sonar) ، ناوبری و تشخیص فاصله توسط صوت ( sound navigation and ranging)، تکنولوژی است که با استفاده از انتشار صدا در زیر آب قادر به شناسایی دیگر ناوها یا کشتی ها است
امروزه فیلترهای شانه ای در کاربرد های گسترده ای نظیر حذف نمودن هارمونیک های خطوط تغذیه و از بین بردن در همریختگی ناشی ازاهداف ثابت در رادارها و سونارهای نشان دهنده هدف متحرک استفاده می شوند.
تصویربرداری از اهداف زیر آب با استفاده از امواج صوتی، (sonar )
تصویربرداری از اهداف زیر آب با استفاده از امواج صوتی، مشابه روش به کار رفته در رادار روزنه مصنوعی، امکان پذیر است و در سال های اخیر در پژوهش های متعددی به موضوع سونار روزنه مصنوعی پرداخته شده است. در مواردی که نیاز به تصویربرداری از اهداف زیر آبی متحرک باشد، ایده سونار روزنه مصنوعی معکوس با الهام گرفتن از رادار روزنه مصنوعی معکوس قابل به کارگیری است اما باید شرایط و محدودیت های کانال زیر آب، مدنظر قرارگیرد. در سونار روزنه مصنوعی معکوس تک پایه و چالش های به کارگیری آن، سونار روزنه مصنوعی معکوس چندپایه ای پیشنهاد خواهد شد که با شرایط و هندسه خاص قرارگیری و با استفاده از منابع مجازی ایجاد شده به دلیل نحوه انتشار امواج در آب های کم عمق، تصاویر باکیفیت تری از اهداف متحرک زیر آب نسبت به حالت تک پایه ایجاد خواهد کرد. کیفیت بهتر تصاویر به دلیل دستیابی به چندگانگی مکانی ناشی از چندپایه کردن مجازی سونارهاست که با استفاده از خاصیت آب های کم عمق و چندمسیرگی موجود در آن و با استفاده از تنها یک فرستنده واقعی ایجاد گشته است.
تفاوت سونار با رادار:
رادارها امواج الکترومغناطیسی به کار می برند، و سونارها از امواج فراصوتی، که مانند امواج صوتی، ولی دارای بسامد بسیار بالا هستند استفاده می کنند. امواج فراصوتی هم مانند امواج صوتی و نور بازتابش می شوند. به کمک این امواج بازتابش شده ی نقشه ی سطح زیر دریاها و جای پستی و بلندی ها کاملاً مشخص می شود.
شرط عملکرد سیستم سونار :
نسبت سیگنال به پارازیت مشخص میکند که آیا سونار می تواند سیگنال هایی را در حضور پارازیت های زمینه در اقیانوس مشخص کند یا خیر.
برای این کار مواردی از جمله مرتبه منبع ، انتشار صدا ، جذب صدا ، اتلاف در انعکاس ، صداهای محدود و ویژگی های دریافت کننده در نظر گرفته می شود.
انواع سونار:
سونار دو نوع است :
۱) (سونار فعال)Active Sonar
۲) (سونار غیر فعال)Passive Sonar
سونار فعال ( محدوده پژواک ):
سیستم سونار فعال ، مثل ماهی یابها ، صداهای پژواک و سونارهای نظامی یک پالس صدا را می فرستند و منتظر پژواک آن می مانند . در سیستم سونار فعال منبع مانند یک دریافت کننده عمل میکند.
عملکرد سونار active فعال:
معادله باید موارد زیر را در نظر بگیرد:
بلندی شدت منبع صدا (مرتبه منبع)
انتشار صدا و میرایی هنگامی که پالس صدا از سونار به سوی هدف حرکت میکند(اتلاف حرکتی)
مقدار صدای منعکس و برگردانده شده به سمت سونار توسط هدف (توانایی هدف)
انتشار صدا و میرایی هنگامی که پالس منعکس شده به سوی دریافت کننده برمیگردد(اتلاف حرکتی)
پارازیتهای زمینه در دریافت کننده(مرتبه پارازیتها)
عبارتها در معادلات سونار بر حسب دسیبل هستند و با یکدیگر جمع میشوند تا معادلات سونار را بوجود آورند.
عملکرد سونار passive غیر فعال:
سونار غیر فعال با ایجاد پالس های صوتی (معروف به پینگ) ، وسپس گوش دادن به پالس بازگشتی عمل میکند . برای تشخیص فاصله از هدف ، شخص می تواند مدت زمان بین دریافت و ارسال پالس را اندازه گیری کند. برای اندازه گیری جهت و راستای هدف می توان از هیدروفونیک های متعدد استفاده کرده ، و سپس زمان دریافت پالس توسط هر یک از این هیدروفون ها را اندازه گرفت ، و با مقایسه این زمان ها به راحتی می توان جهت و راستای هدف را تعیین نمود .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک

🔴مجله علوم مخابرات (فرکانس) به بررسی انواع "رادار و سیستم های نوین مخابراتی" میپردازد .این مجله به سرپرستی "دکتر افشین رشید" و جمعی از دانشجویان برگزیده ایشان اداره میشود.🔵
نویسنده 1
نویسنده 2
نویسنده 3
نویسنده 4
نویسنده 5
نویسنده 6
نویسنده 7
نویسنده 8
نویسنده 9
نویسنده 10
نویسنده 11
آبان ۱۴۰۴
مهر ۱۴۰۴
شهریور ۱۴۰۴
مرداد ۱۴۰۴
تیر ۱۴۰۴
خرداد ۱۴۰۴
اردیبهشت ۱۴۰۴
فروردین ۱۴۰۴
اسفند ۱۴۰۳
بهمن ۱۴۰۳
دی ۱۴۰۳
آذر ۱۴۰۳
آبان ۱۴۰۳
مهر ۱۴۰۳
شهریور ۱۴۰۳
مرداد ۱۴۰۳
تیر ۱۴۰۳
خرداد ۱۴۰۳
اردیبهشت ۱۴۰۳
فروردین ۱۴۰۳
اسفند ۱۴۰۲
بهمن ۱۴۰۲
دی ۱۴۰۲
آذر ۱۴۰۲
آبان ۱۴۰۲
مهر ۱۴۰۲
شهریور ۱۴۰۲
مرداد ۱۴۰۲
تیر ۱۴۰۲
خرداد ۱۴۰۲
اردیبهشت ۱۴۰۲
فروردین ۱۴۰۲
اسفند ۱۴۰۱
بهمن ۱۴۰۱
دی ۱۴۰۱
آذر ۱۴۰۱
آبان ۱۴۰۱
مهر ۱۴۰۱
شهریور ۱۴۰۱
مرداد ۱۴۰۱
تیر ۱۴۰۱
خرداد ۱۴۰۱
اردیبهشت ۱۴۰۱
فروردین ۱۴۰۱
اسفند ۱۴۰۰
بهمن ۱۴۰۰
دی ۱۴۰۰
آذر ۱۴۰۰
آبان ۱۴۰۰
مهر ۱۴۰۰
شهریور ۱۴۰۰
مرداد ۱۴۰۰
تیر ۱۴۰۰
خرداد ۱۴۰۰
اردیبهشت ۱۴۰۰
فروردین ۱۴۰۰
اسفند ۱۳۹۹
بهمن ۱۳۹۹
دی ۱۳۹۹
آذر ۱۳۹۹
آبان ۱۳۹۹
مهر ۱۳۹۹
شهریور ۱۳۹۹
مرداد ۱۳۹۹
تیر ۱۳۹۹
خرداد ۱۳۹۹
اردیبهشت ۱۳۹۹
فروردین ۱۳۹۹
اسفند ۱۳۹۸
بهمن ۱۳۹۸
دی ۱۳۹۸
آذر ۱۳۹۸
آبان ۱۳۹۸
مهر ۱۳۹۸
شهریور ۱۳۹۸
مرداد ۱۳۹۸
تیر ۱۳۹۸
خرداد ۱۳۹۸
اردیبهشت ۱۳۹۸
فروردین ۱۳۹۸
اسفند ۱۳۹۷
بهمن ۱۳۹۷
دی ۱۳۹۷
آذر ۱۳۹۷
آبان ۱۳۹۷
مهر ۱۳۹۷
شهریور ۱۳۹۷
مرداد ۱۳۹۷
تیر ۱۳۹۷
خرداد ۱۳۹۷
اردیبهشت ۱۳۹۷
فروردین ۱۳۹۷
آنتن ها (164)
امواج (163)
الکترونیک (156)
مجله علوم مخابرات (75)
فرکانس (46)
رادار (43)
Powered By
مجله علوم مخابراتِ (فرکانس) © _ تاسیس ۱۳۹۷